题目描述
组合数表示的是从n个物品中选出m个物品的方案数。举个例子,从(1,2,3) 三个物品中选择两个物品可以有(1,2),(1,3),(2,3)这三种选择方法。根据组合数的定 义,我们可以给出计算组合数的一般公式:
其中n! = 1 × 2 × · · · × n
小葱想知道如果给定n,m和k,对于所有的0 <= i <= n,0 <= j <= min(i,m)有多少对 (i,j)满足是k的倍数。
输入输出格式
输入格式:
第一行有两个整数t,k,其中t代表该测试点总共有多少组测试数据,k的意义见 【问题描述】。
接下来t行每行两个整数n,m,其中n,m的意义见【问题描述】。
输出格式:
t行,每行一个整数代表答案。
输入输出样例
1 2 3 3
1
2 5 4 5 6 7
0 7
说明
【样例1说明】
在所有可能的情况中,只有是2的倍数。
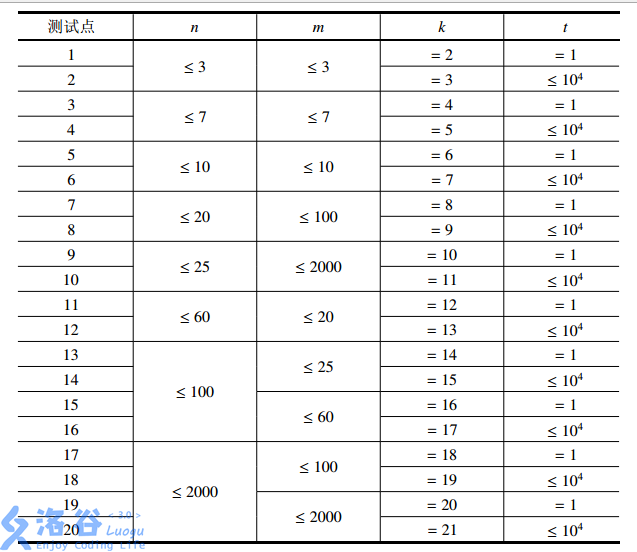
【子任务】
思路:
该题需要使用到组合数的递推式
C[i][j]=(C[i-1][j]%k+C[i-1][j-1]%k)%k(需要在预处理的时候随手取模)
解释:n个物品中取m个物品,若不取a这个物品,则从n-1个物体中选m个;
若取a这个物品则从n-1中选m-1个。
详见高中数学课本选修2—3
然后我们做完上述预处理之后,从头到尾扫一遍C数组是否为0即可知道是否为k的倍数。
按要求输出即可,这题就到此结束啦!
但是。。这样就真的over了吗?!
没有!
其实是只有90分的。。。。
什么?为何不满分?
大概是扫C数组太花时间了吧。。。。所以我们还需要一些优化!
我们预处理了C数组,那么是否还可以预处理一下k的倍数的个数?
答案是肯定的!
令s[i][j]表示在所有的C(i,j) (1≤j≤i)的里面,为k的倍数的有多少个,所以得到处理数组的时候就是p[i][j] = p[i][j-1] ,然后使每找到一个C[i][j]为0就让p[i][j]的值+1。
最后只需要从1-n循环一遍令ans+=p[i][j],最后输出ans即可(注意这里的0 <= j <= min(i,m)!)
好啦!这样就ok啦!
上代码:
#include <iostream> #include <cstdio> using namespace std; const int N = 2001; const int M = 2001; int T,k,n,m,ans; int C[N][M],p[N][M]; void pre() { for(int i=1; i<N; ++i) { C[i][0]=C[i][i]=1; for(int j=1; j<i; ++j) C[i][j]=(C[i-1][j]%k+C[i-1][j-1]%k)%k; } for(int i=1; i<N; ++i) for(int j=1; j<=i; ++j) { p[i][j]=p[i][j-1]; if(C[i][j]==0) p[i][j]++; } } int main() { scanf("%d%d",&T,&k); pre(); while(T--) { scanf("%d%d",&n,&m); for(int i=1,j; i<=n; ++i) { j=min(i,m); ans+=p[i][j]; } printf("%d ",ans); ans=0; } return 0; }