信号量 IPC 原理
信号量通信机制主要用来实现进程间同步,避免并发访问共享资源。信号量可以标识系统可用资源的个数。最简单的信号量为二元信号量
下图为 Linux 信号量通信机制的概念图。在实际应用中,两个进程通信可能会使用多个信号量,因此,Linux 在管理时以信号量集合的概念来管理。
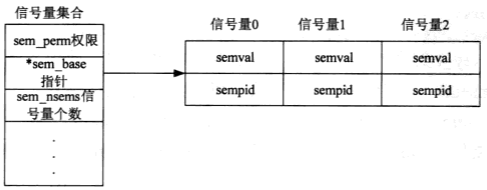
通常所说的创建一个信号量实际上是创建了一个信号量集合,在这个信号量集合中,可能有多个信号量。整个信号量集合由以下部分组成。
1.信号量集合数据结构:在此数据结构中定义了整个信号量集合的基本属性,如访问权限。
2.信号量:信号量集合使用指针指向一个由数组构成的信号量单元,在此信号量单元中存储了各信号量的值。
信号量集合的数据结构定义如下:
from /usr/include/linux/sem.h
struct semid_ds {
struct ipc_perm sem_perm; /* permissions .. see ipc.h 权限 */
__kernel_time_t sem_otime; /* last semop time 最近semop时间 */
__kernel_time_t sem_ctime; /* last change time 最近修改时间 */
struct sem *sem_base; /* ptr to first semaphore in array 第一个信号量 */
struct sem_queue *sem_pending; /* pending operations to be processed 阻塞信号量 */
struct sem_queue **sem_pending_last; /* last pending operation 最后一个阻塞信号量 */
struct sem_undo *undo; /* undo requests on this array undo队列 */
unsigned short sem_nsems; /* no. of semaphores in array 信号量数 */
};
信号量的数据结构定义如下:
from /usr/src/kernels/xxx/include/linux/sem.h
xxx 为 uname -r 命令所得
struct sem {
int semval; /* current value 信号量的值 */
int sempid; /* pid of last operation 最近一个操作的进程号PID */
};
Linux 信号量管理操作
1.创建信号量集合
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
/*
* 第一个参数为 key 值,一般由 ftok() 函数产生
* 第二个参数为创建的信号量个数,以数组的方式存储
* 第三个参数用来标识信号量集合的权限
*/
int semget(key_t key, int nsems, int semflg);
2.控制信号量集合、信号量
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
/*
* 第一个参数为要操作的信号量标识符
* 第二个参数,如果要操作的是信号量则它是信号量的下标;如果操作集合,此参数无意义
* 第三个参数为要执行的操作
* 第四个参数则需根据第三个参数进行设置,其类型为 senum 的共用体
*/
int semctl(int semid, int semnum, int cmd, ...);
semun 共用体如下:
union semun {
int val; /* Value for SETVAL */
struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short *array; /* Array for GETALL, SETALL */
struct seminfo *__buf; /* Buffer for IPC_INFO
(Linux-specific) */
};
3.信号量的操作
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
/*
* 第一个参数为要操作的信号量的标识符
* 第二个参数为 sembuf 结构体
* 第三个参数为 sops 个数
*/
int semop(int semid, struct sembuf *sops, unsigned nsops);
sembuf 结构体如下:
struct sembuf {
unsigned short sem_num; /* semaphore index in array 信号量下标 */
short sem_op; /* semaphore operation 信号量操作 */
short sem_flg; /* operation flags 操作标识 */
};
sem_flg 为操作标识。可选为以下各值:
IPC_NOWAIT:在对信号量集合的操作不能执行的情况下,调用立即返回。
SEM_UNDO:当进程退出后,该进程对 sem 进行的操作将被撤销。
程序实例
下面用一个程序来演示 SEM_UNDO 的效果:
#include <stdio.h>
#include <sys/types.h>
#include <sys/ipc.h>
#include <sys/sem.h>
#include <unistd.h>
#include <stdlib.h>
union semun {
int val; /* Value for SETVAL */
struct semid_ds *buf; /* Buffer for IPC_STAT, IPC_SET */
unsigned short *array; /* Array for GETALL, SETALL */
struct seminfo *__buf; /* Buffer for IPC_INFO */
};
static void sem_init(int id)
{
union semun sem;
sem.val = 10;
/* 初始化信号量的值 */
semctl(id, 0, SETVAL, sem);
}
static void sem_v(int id)
{
struct sembuf buf = {
.sem_num = 0,
.sem_op = -1,
/* 可改为 SEM_UNDO 查看结果 */
// .sem_flg = 0,
.sem_flg = SEM_UNDO,
};
/* 操作信号量 */
semop(id, &buf, 1);
}
static int get_val(int id)
{
/* 获取信号量的值 */
return semctl(id, 0, GETVAL);
}
int main()
{
int sem_id, pid;
/* 创建信号量集合 */
sem_id = semget((key_t)1004, 1, IPC_CREAT | 0600);
sem_init(sem_id);
if((pid = fork()) == -1){
perror("fork Err");
exit(0);
}
else if(!pid){
sem_v(sem_id);
printf("child : %d
", get_val(sem_id));
}
else{
sleep(1);
printf("parent : %d
", get_val(sem_id));
}
return 0;
}
如果未采用 SEM_UNDO 标识,子进程输出 9 ,父进程输出 9;
如果采用了 SEM_UNDO 标识,子进程输出 9,父进程输出 10。