<p><iframe name="ifd" src="https://mnifdv.cn/resource/cnblogs/LearnESP32" frameborder="0" scrolling="auto" width="100%" height="1500"></iframe></p>
先上视频
说明
为了使初学者都可以直接看此章节实现WiFi视频遥控小车,内容是一步到位的.
对于已经有经验的开发者可以按照自己的意愿去下载和测试.
组装过程中需要手动焊接哈, 需要准备电烙铁和焊锡丝
步骤1(下载ESP32程序到开发板)
1.如果自己的电脑没有安装过CH340驱动,则先安装CH340驱动
观看安装步骤

使用USB线(Micro)连接开发板

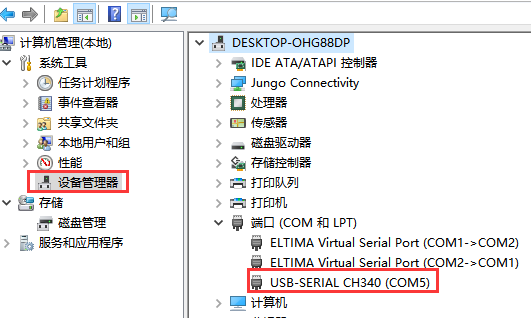
如果电脑提示安装硬件驱动 ,等待安装完成,然后右击 "我的电脑" 选择管理

点击设备管理器,点击端口 查看当前电脑和开发板通信的端口号
我的为 COM5 (不同的电脑端口号不一样,只要有端口号就说明安装成功)
2.下载固件程序
1.连接开发板

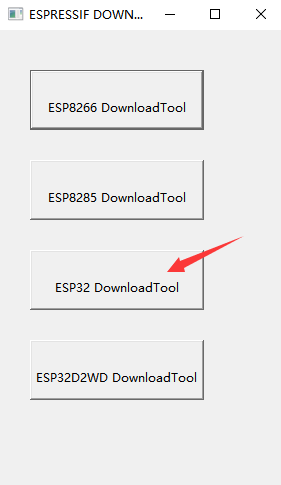
2.打开烧录软件


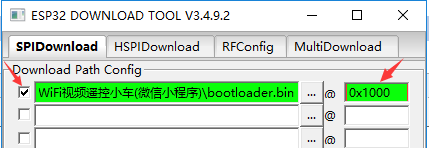
3.添加 bootloader.bin 文件
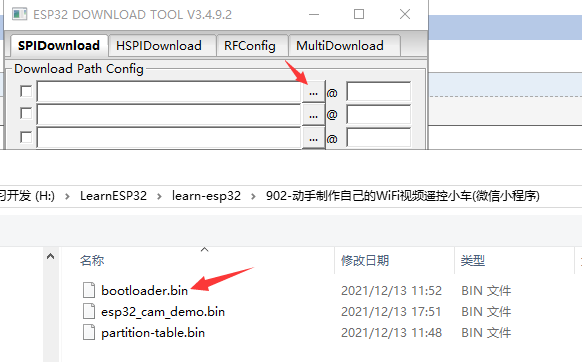
前面选择上, 后面填写: 0x1000
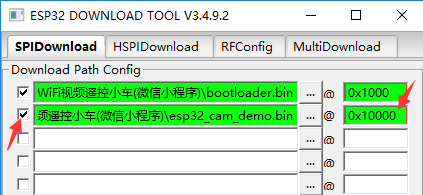
4.接着再添加 esp32_cam_demo.bin 文件
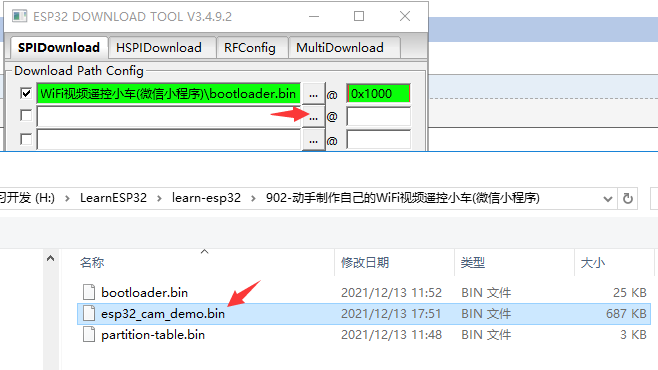
前面选择上, 后面填写: 0x10000
5.最后添加 partition-table.bin 文件
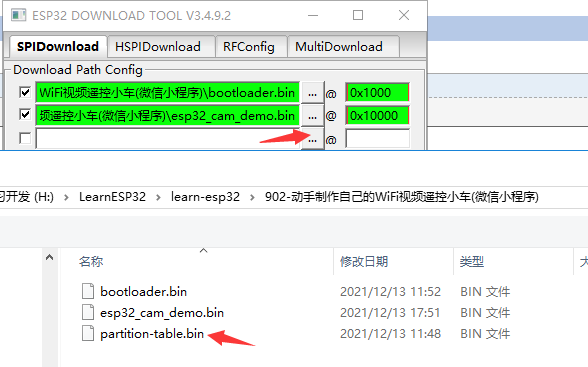
前面选择上, 后面填写: 0x8000

6.按照下面的选项 (COM 口选择自己的哈), 点击START

7.显示 完成 说明下载成功了
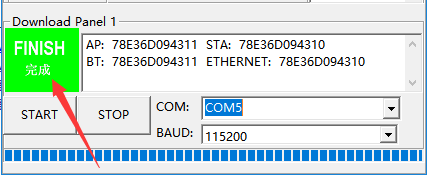
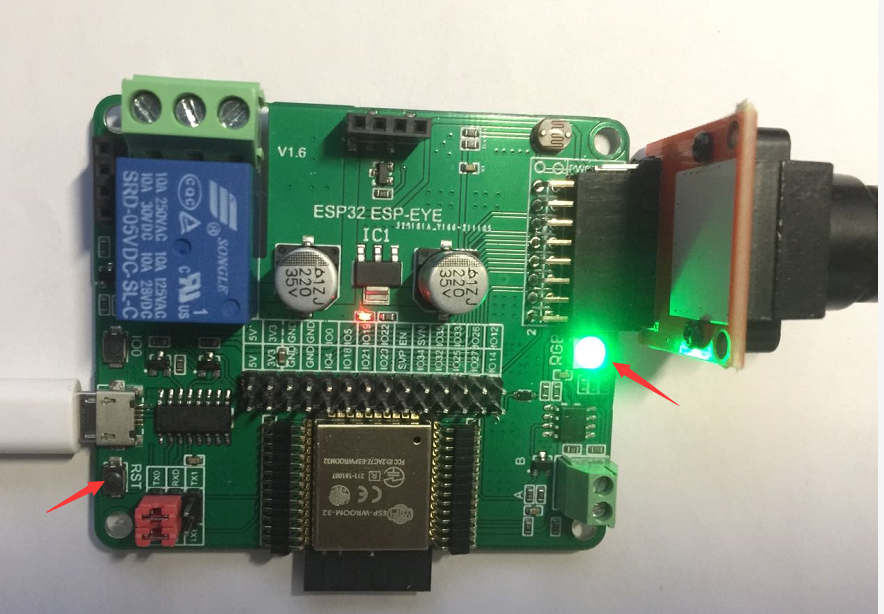
复位一下开发板,正常情况下RGB三色灯会闪耀,同时可以使用手机查看到有一个名为: ESP32_xxxxxx的无线信号

步骤2 (使用微信小程序先连接查看一下图像)
1.根据下面的章节安装微信小程序开发工具
https://www.cnblogs.com/yangfengwu/p/9992613.html
2.在开发软件上选择项目->导入项目

3.在开发软件上选择项目->导入项目

4. AppID设置为自己的
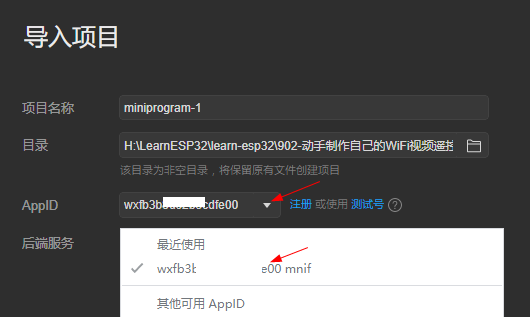
5. 不使用云服务, 点击确定

6.编译,预览, 使用微信扫码安装到手机

7.手机连接名称为ESP32_xxxx的热点, 密码为: 11223344

8.在微信上重新打开 微信小程序 就可以看到图像了

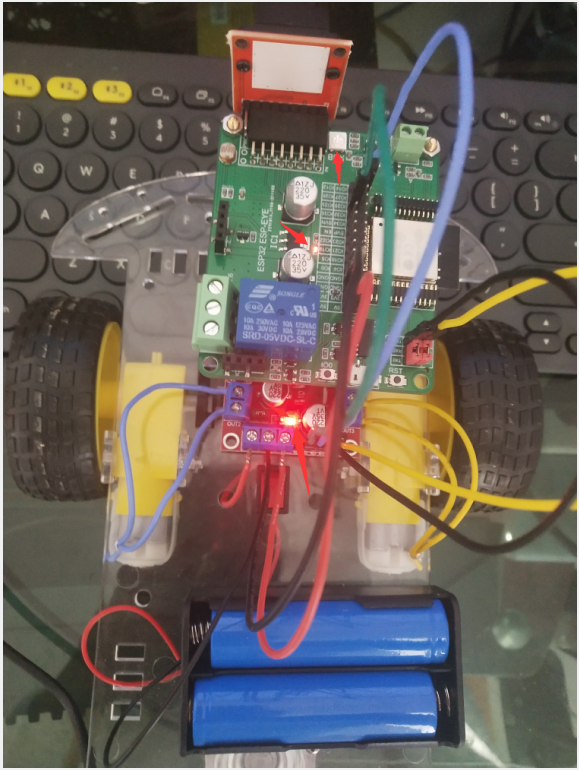
步骤3 (组装小车)
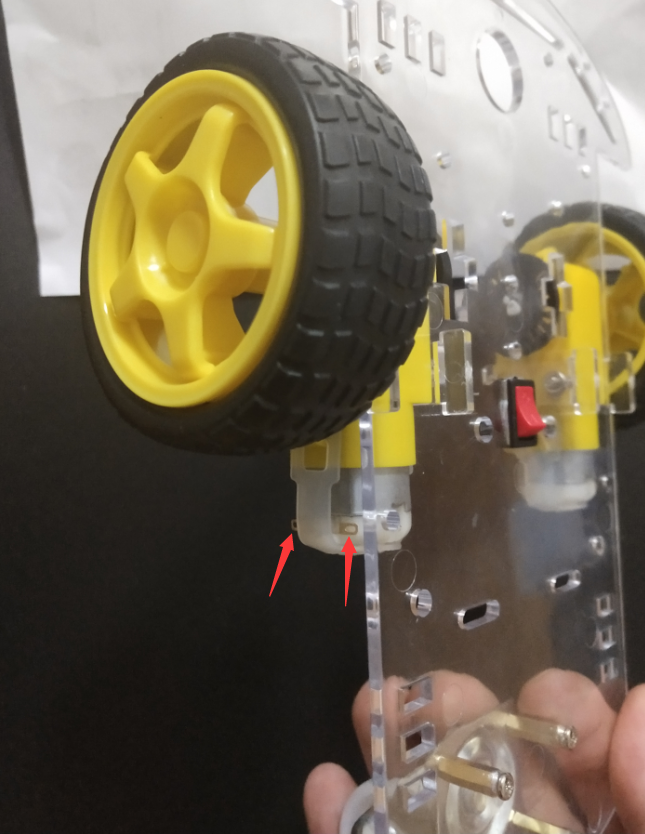
1.组装小车(电机的接线端子最好朝外,因为咱需要焊机导线)
2.安装上电池座和电机驱动模块
我找了半天也只能找到使用一个螺丝固定的方式, 孔不好对上
可以使用胶水粘, 也可以使用热熔胶固定

那个电机驱动模块的下面多垫一个螺母可以更好的固定

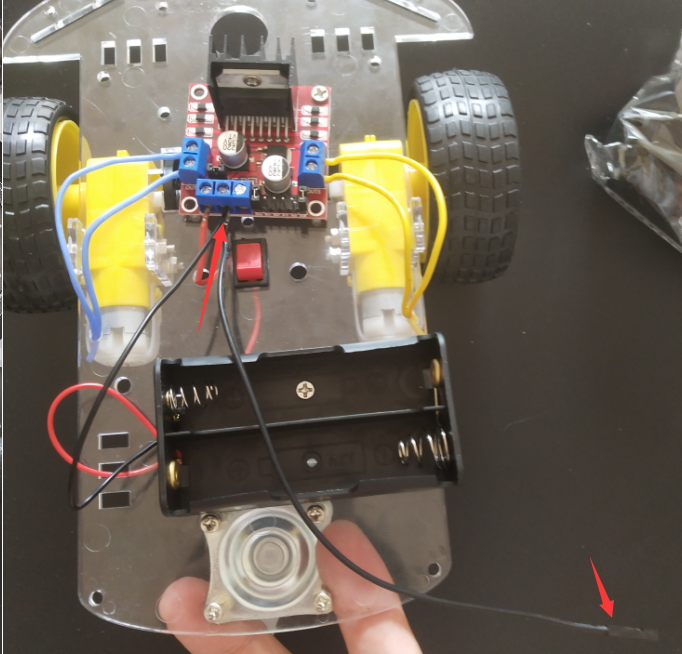
3.把电池的正极通过开关连接的 电机驱动模块的 12V供电端子上
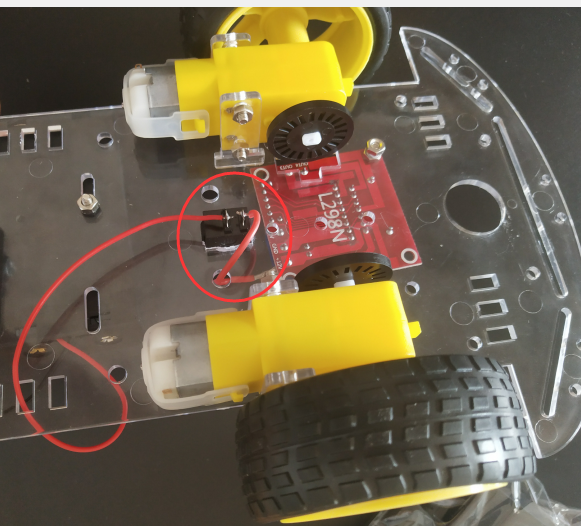
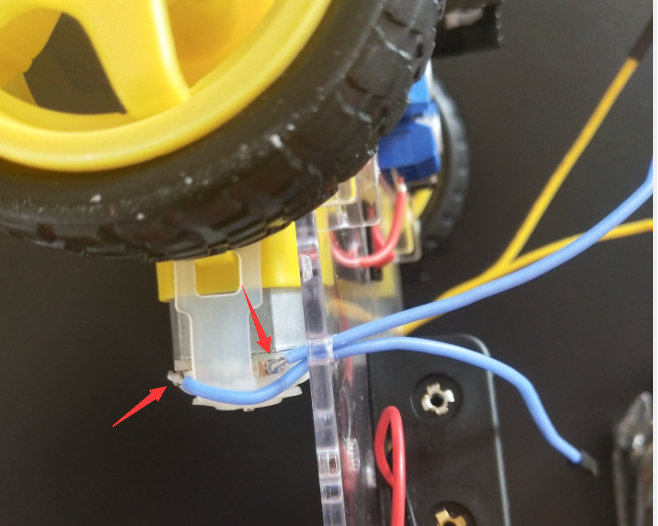
4.把一根杜邦线截断,然后穿过去,然后焊接到电机上
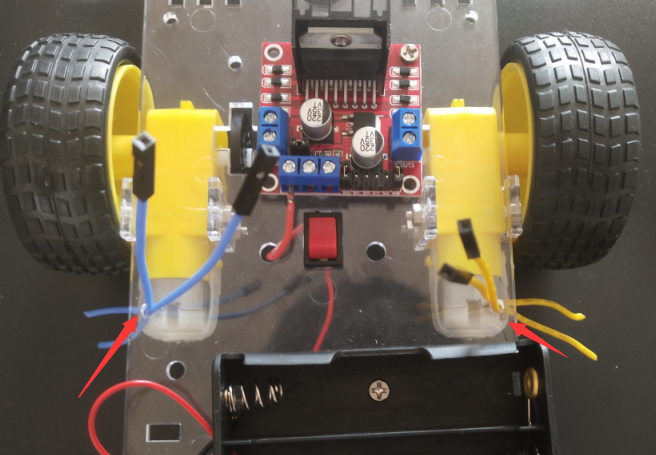

5.左右的两对线分别连接到电机驱动模块的左右端子上(没有顺序,随便接)
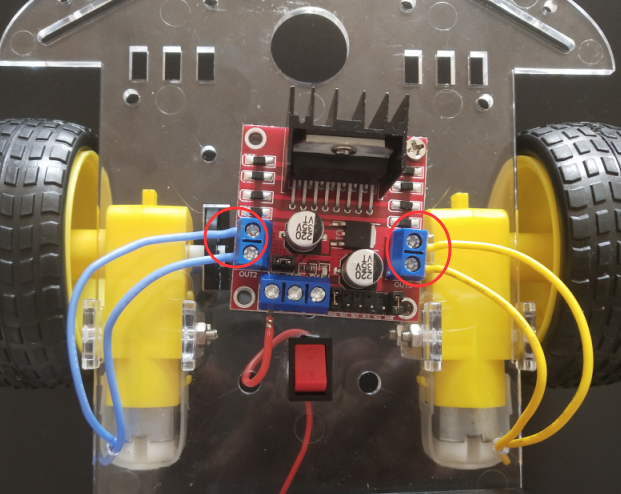
6.把电池的负极线和一根杜邦线同时接到电机驱动模块的GND端子上.
引出这根杜邦线是为了后面给开发板供电(一般黑线接GND)
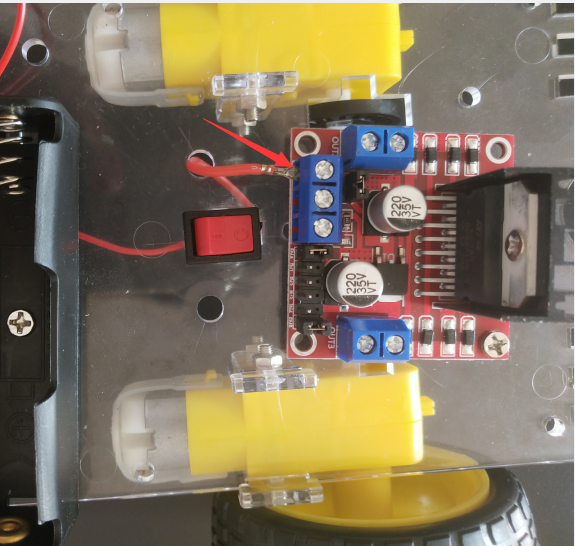
7.把一根杜邦线接到电机驱动模块的5V端子上
引出这根杜邦线是为了后面给开发板供电 (一般红线接VCC)

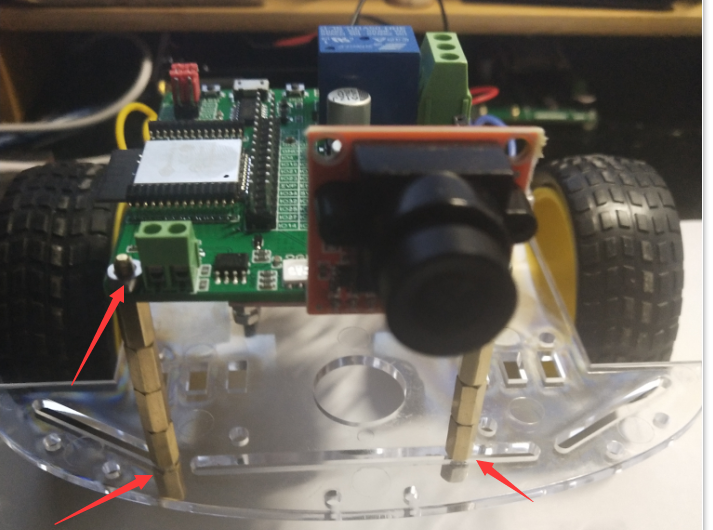
8.使用螺柱把开发板安装上
9.把给开发板的供电线接上(红线接5V, 黑线接GND)
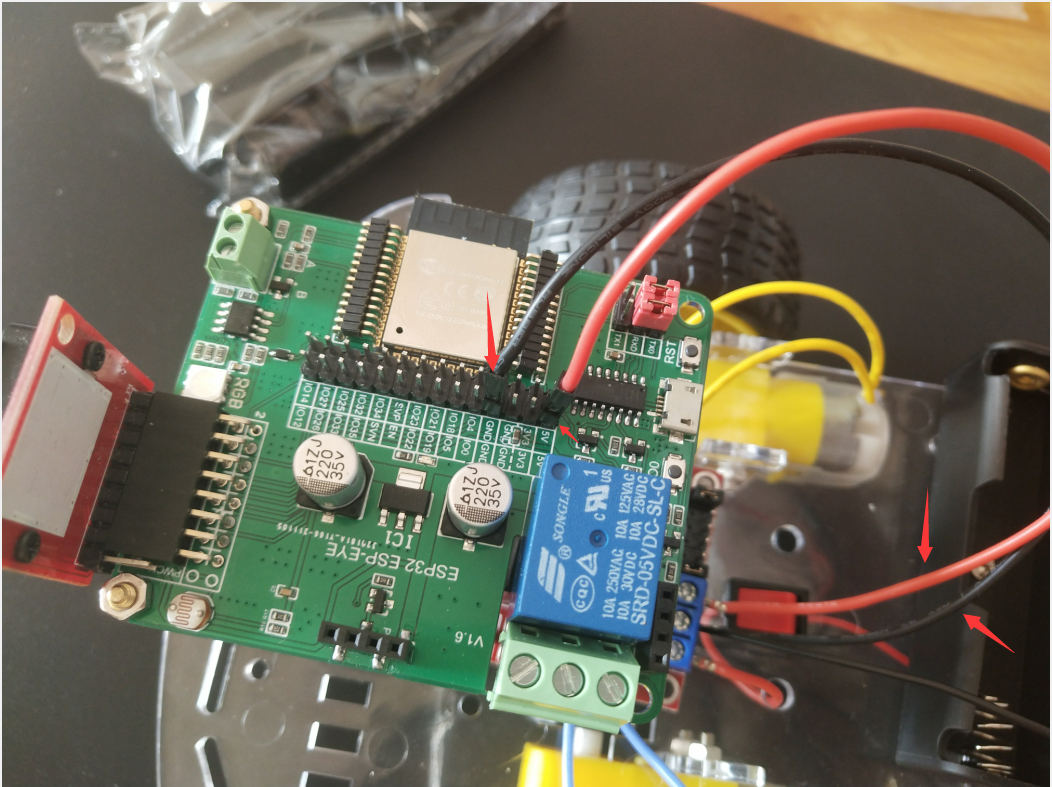
10.使用杜邦线把开发板的IO33引脚 和 电机驱动模块的 IN1 引脚 连接; IO14引脚和电机驱动模块的 IN2 引脚连接
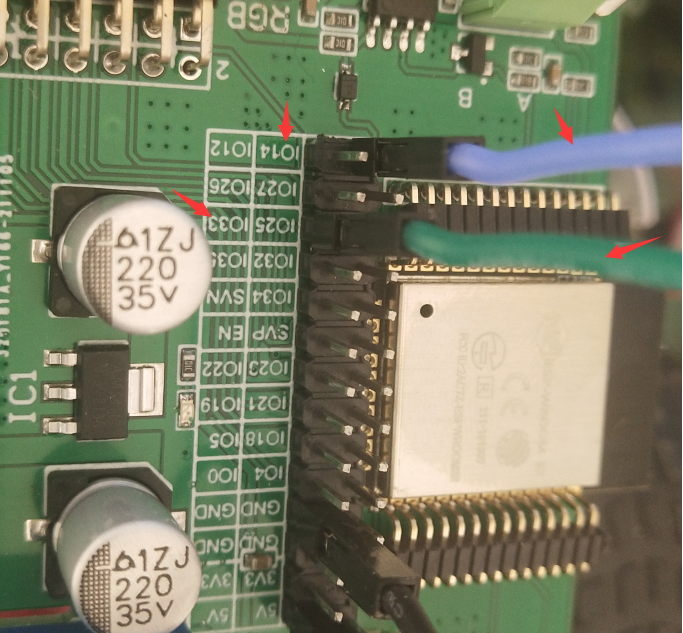
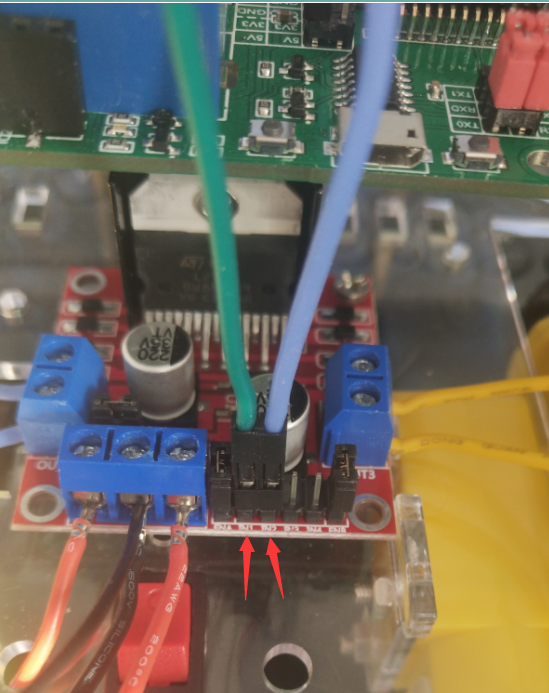
11.使用杜邦线把开发板的TX1引脚 和 电机驱动模块的 IN3 引脚 连接; RX1引脚和电机驱动模块的 IN4 引脚连接


步骤4 (调试测试)
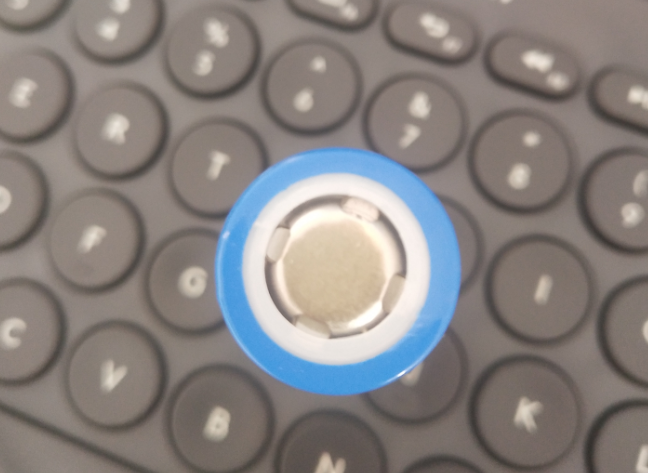
1.这个样子的是电池的正极
2,安装上电池,并打开电源开关(电源指示灯会亮)
3.手机连接名称为ESP32_xxxx的热点, 密码为: 11223344
4.打开微信小程序 应该看到图像了

5.按下 前进 按键,观察左右两边的轮子是否都是往前转
如果左面的轮子往后转, 则把IN1 和 IN2 的杜邦线左右调换一下就可以;
如果右面的轮子往后转, 则把IN3 和 IN4 的杜邦线左右调换一下就可以;
我现在的左面的轮子往后转
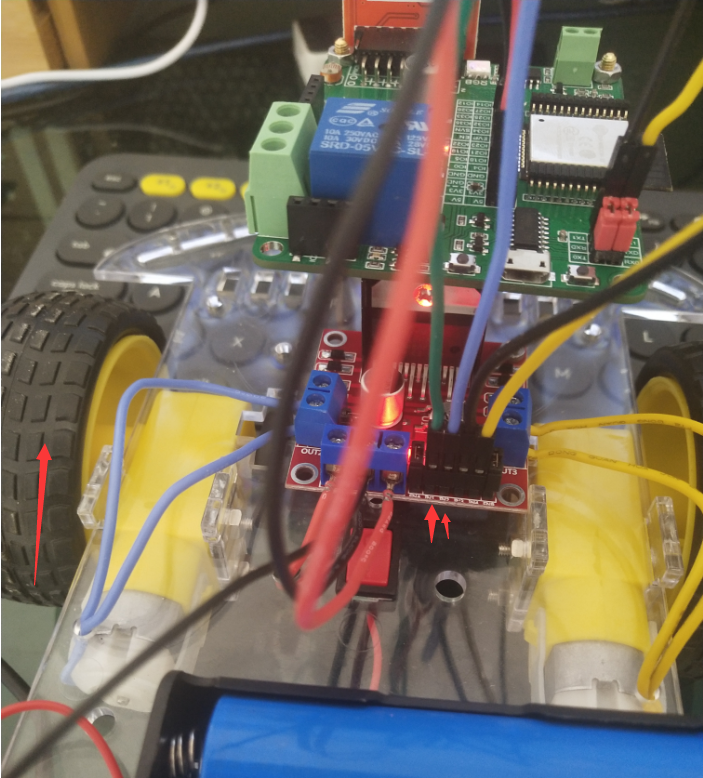
我就把 IN1 和 IN2 的杜邦线左右调换一下

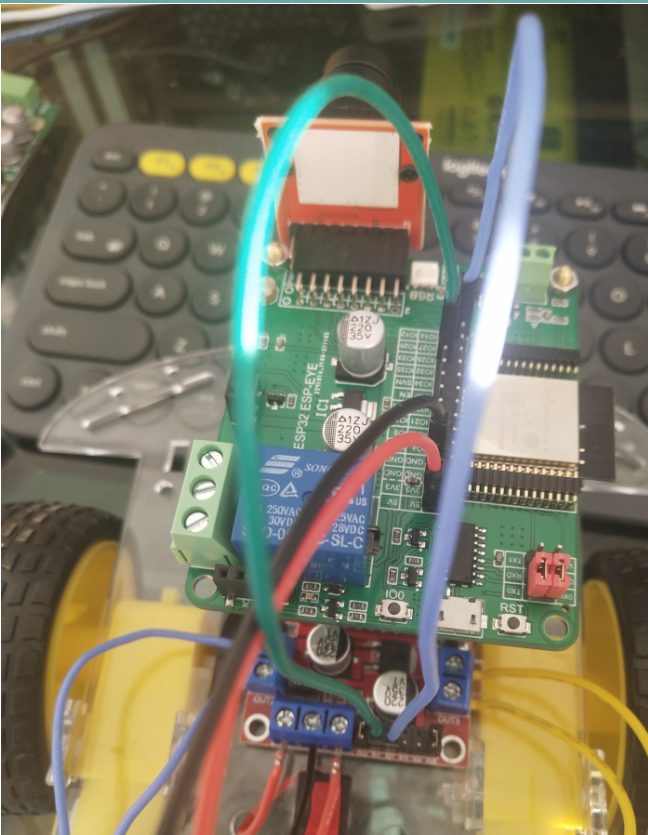
6.然后整个小车就做好了
1.大家伙会发现图像是上下颠倒的 , 我改了图像采集的设置但是还没有解决...
大家伙可以把开发板反过来......
2.控制的时候会发现小车有点冲, 现在程序上是直接控制的引脚输出高低电平,
后面我抽空把引脚输出改为PWM就好了.
程序说明
1.这篇文章写的有点长,我就长话短说
这节代码是在下面章节的基础上更改的, 这里我只说明下更改和添加了哪些程序.
用户先去看下面的章节哈,然后再回来看我下面写的哈.
https://www.cnblogs.com/yangfengwu/p/15671232.html

2.把这节的ESP32代码放到非中文目录,然后使用VS Code打开

3.这节的代码增加了4个GPIO,分别控制 左前 左后 右前 右后
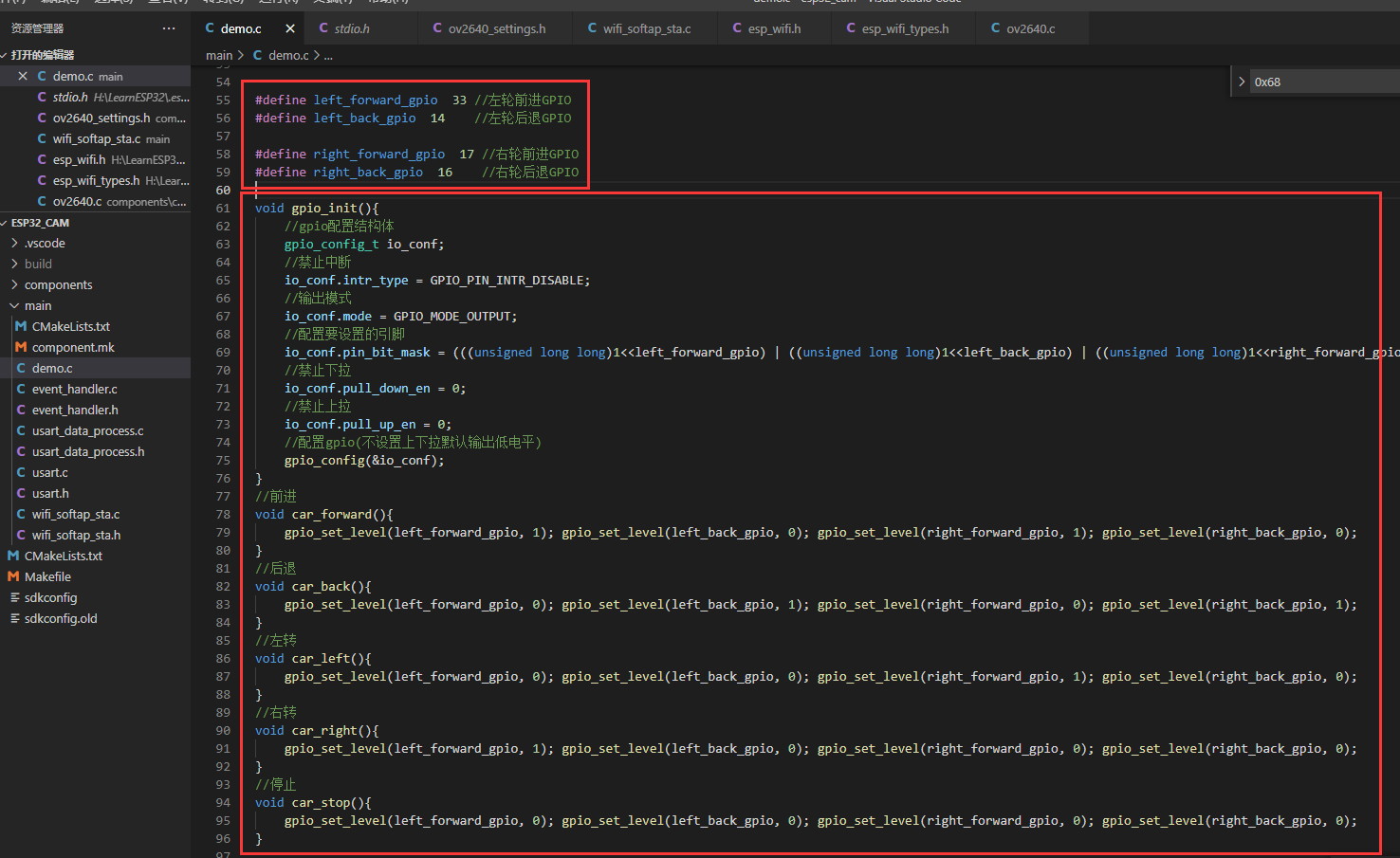
4.调用的地方

5.为了把每个小车区分,WiFi的热点不再是固定的, WiFi的热点是以ESP32_xxxx; 后面的xxxx是以MAC地址命名
