先转载一片文章先,主要是参考了其搭建环境的部分:
https://blog.csdn.net/qq_40452910/article/details/88560310
你可以直接看本文,本文经过更好地整理、实操、记录。
一、源码下载
1、libmodbus官网
https://libmodbus.org/download/
2、下载
选择长期稳定版本libmodbus-3.0.6.tar.gz
二、交叉编译
1、解压
拷贝到相应目录,解压,例如拷贝在/usr/local/modbus下,modbus目录需要自己创建
tar -zxvf libmodbus-3.0.6.tar.gz
2、创建安装目录
mkdir install
3、进入解压的目录
cd libmodbus-3.0.6
4、配置编译选项
(注:--prefix选项是安装目录,根据自己环境确定)
./configure --host=[交叉编译工具链前缀] --enable-static --prefix=[安装路径]/install/
[安装路径]例如/usr/local/modbus,[交叉编译工具链]例如arm-none-linux-gnueabi
5、编译
make
6、安装
make install
若出现了错误:
../libtool: line 1102: arm-none-linux-gnueabi-ranlib: command not found
make[2]: *** [install-libLTLIBRARIES] Error 127
make[2]: Leaving directory `/usr/local/modbus/libmodbus-3.0.6/src'
make[1]: *** [install-am] Error 2
make[1]: Leaving directory `/usr/local/modbus/libmodbus-3.0.6/src'
make: *** [install-recursive] Error 1
解决方法:
执行sudo –i,执行完之后会自动切换到/root目录。所以需要切换回之前的目录,执行make install,就可以成功。
7、生成动态链接库
在install生成三个目录:include lib share
lib文件夹中的libmodbus.so、libmodbus.so.5、libmodbus.so.5.0.5就是动态链接库
三、移植到ARM开发板
1、复制文件到ARM开发板
将libmodbus.so、libmodbus.so.5、libmodbus.so.5.0.5复制到ARM开发板中的/usr/lib目录下
执行cp libmodbus.so* /usr/lib(常用的动态链接库,存放在该目录下)会出现无法创建的问题(cannot create ‘/usr/lib/libmodbus.so*’: Read-only file system)。
解决方法:执行 wr cp libmodbus* /usr/lib
四、创建测试程序
1、创建测试程序C文件
在PC机linux系统下新建.c文件,将下列代码粘贴进去
/*************************
**
** modbus-rtu-test.c
** 移植libmodbus库到ARM开发板,并测试成功
**
**************************/
#include <stdio.h>
#include <unistd.h>
#include <string.h>
#include <stdlib.h>
#include <errno.h>
#include "modbus.h" //modbus动态库文件
int main(int argc, char *argv[])
{
uint16_t tab_reg[64] = {0}; //定义存放数据的数组
modbus_t *ctx = NULL;
int rc;
int i;
//以串口的方式创建libmobus实例,并设置参数
ctx = modbus_new_rtu("/dev/ttyS1", 115200, 'N', 8, 1);
if (ctx == NULL) //使用UART1,对应的设备描述符为ttyS1
{
fprintf(stderr, "Unable to allocate libmodbus contex
");
return -1;
}
modbus_set_debug(ctx, 1); //设置1可看到调试信息
modbus_set_slave(ctx, 1); //设置slave ID
if (modbus_connect(ctx) == -1) //等待连接设备
{
fprintf(stderr, "Connection failed:%s
", modbus_strerror(errno));
return -1;
}
while (1)
{
printf("
----------------
");
rc = modbus_read_registers(ctx, 0, 10, tab_reg);
if (rc == -1) //读取保持寄存器的值,可读取多个连续输入保持寄存器
{
fprintf(stderr,"%s
", modbus_strerror(errno));
return -1;
}
for (i=0; i<10; i++)
{
printf("reg[%d] = %d(0x%x)
", i, tab_reg[i], tab_reg[i]);
}
usleep(3000000);
}
modbus_close(ctx); //关闭modbus连接
modbus_free(ctx); //释放modbus资源,使用完libmodbus需要释放掉
return 0;
}
2、复制库中头文件
将/usr/local/modbus/install/include/modbus中的四个头文件modbus.h、modbus-rtu.h、modbus-tcp.h、modbus-version.h复制到上边C语言文件同一文件夹。
3、交叉编译
arm-none-linux-gnueabi-gcc test.c -o test -L /usr/local/modbus/install/lib/ -lmodbus
4、复制可执行文件到开发板
将可执行程序文件test复制到ARM开发板的文件夹下。
五、安装ModbusPoll及ModbusSlave
六、测试
1、测试准备
在执行上述步骤前,需要先连接好相应的硬件,比如串口线等,然后打开ModBus调试助手,设置好波特率等,设置要与上述程序中的保持一致。
 ModBus调试助手相关设置
ModBus调试助手相关设置2、在ARM上运行test程序
若出现错误:./test: error while loading shared libraries: libmodbus.so.5: cannot open shared object file: Error 20
解决方法:将libmodbus.so、libmodbus.so.5、libmodbus.so.5.0.5三个动态链接库复制到当前文件下,就可以正常执行。
3、移植成功
发现ModBus调试助手与开发板数据可以正常传输,测试成功,如图。
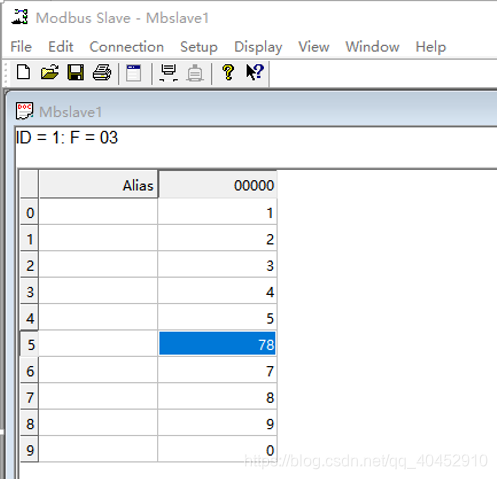 ModBus调试助手发送数据界面
ModBus调试助手发送数据界面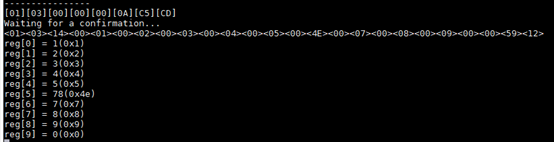 ARM开发板测试程序接收到的数据
ARM开发板测试程序接收到的数据江湖很大,你我相遇在此有一定缘分,可以考虑加个QQ群聊聊人生,技术离不开生活,生活离不开聊聊。

.