摘要: 原创博客:转载请标明出处:http://www.cnblogs.com/zxouxuewei/
好长时间没有更新博客了,今天给大家分享福利,三轮的全向轮运动学正解。机器人控制的基础是运动学分析,利用运动学分析,可以得出机器人运动过程中各类参数的变化规律和相互之间的关系,
采用控制系统对这些参数进行控制,才能设计出正确合理的控制系统。
一,首先车轮的安装方式决定了你的运动学模型。首先我的安装方式为120度安装,如下图安装:

在运动建模之前,为简化运动学数学模型,做下列几种理想化假设:
(1)全向轮不与地面打滑,同时地面有足够摩擦力;
(2)电机轴线中心正是底盘重心;
(3)三个全向轮中心处于同上。
二。在以上条件成立的情况下,机器人运动分析如图所示。
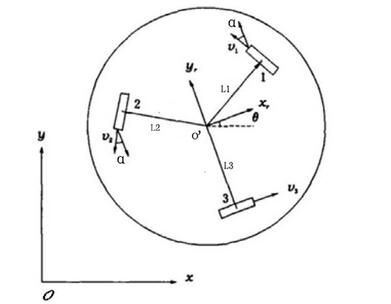
。
其中:α为yr与轮子的夹角,L1、L2、L3为各全向轮中心与底盘中心的距离,v1、v2、v3为第(i=1,2,3)个车轮中心的线速度。根据平面运动速度分解合成关系,可建立如下方程:
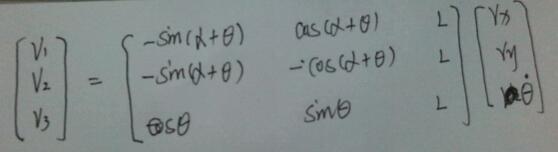
式中,为机器人的角速度,设逆时针方向为正; L1、L2、L3分别为机器人中心到某一时刻各轮子与地面接触点之间距离;vx、vy为机器人相对于车体中心的速度。 为计算方便将L1、L2、L3取近似平均值L, 根据实际结构可知α=30°。同时,车轮的速度瞬心即车轮与地面接触点,可知vi=rω (i=1,2,3)。另外,为简化计算公式,在建立相对坐标系时取θ=0°,将α=30°、θ=0°带入公式1中,可以得到如公式2所示的最终机器人运动学模型:

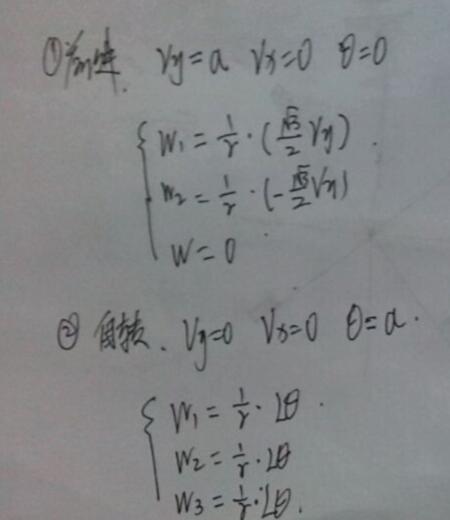
3.然后可以证明看看机器人在x,y,z方向上运动的模型
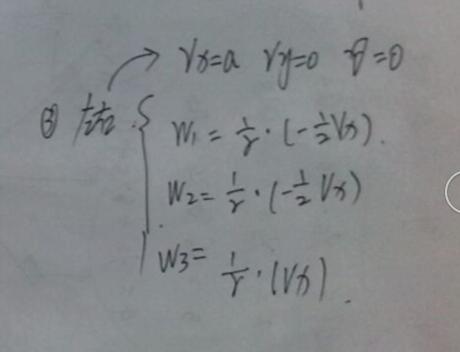
证明完成后:控制的底层函数代码如下:
#define VX_VALUE (0.5f) #define VY_VALUE (sqrt(3)/2.f) #define L_value (20*0.01f) #define RADIUS_value (1.0/12.5*0.01f) void Speed_Moto_Control(float vx,float vy,float vz) { motor_one = (-VX_VALUE*vx + VY_VALUE*vy + L_value*vz); motor_two = (-VX_VALUE*vx - VY_VALUE*vy + L_value*vz); motor_there = (vx + L_value*vz); }