Abstract
紧耦合lidar inertial里程计, 用smoothing和mapping.
1. Introduction
紧耦合lidar-inertial里程计.
一般都是用ICP或者是GICP.
在LOAM[1], IMU被引入来de-skew lidar scan, 然后给移动一个先验做scan-匹配.
在[15], 预积分IMU测量被用来 de-skew 点云.
一个robocentric lidar-inertial 状态估计器, R-LINS[16] , 用error-state KF.
LIOM只能 0.6 倍实时
3. LiDAR Inertial Odometry via SAM
A. System Overview
状态是:
[mathbf{x}=left[mathbf{R}^{mathbf{T}}, mathbf{p}^{mathbf{T}}, mathbf{v}^{mathbf{T}}, mathbf{b}^{mathbf{T}}
ight]^{mathbf{T}}
]
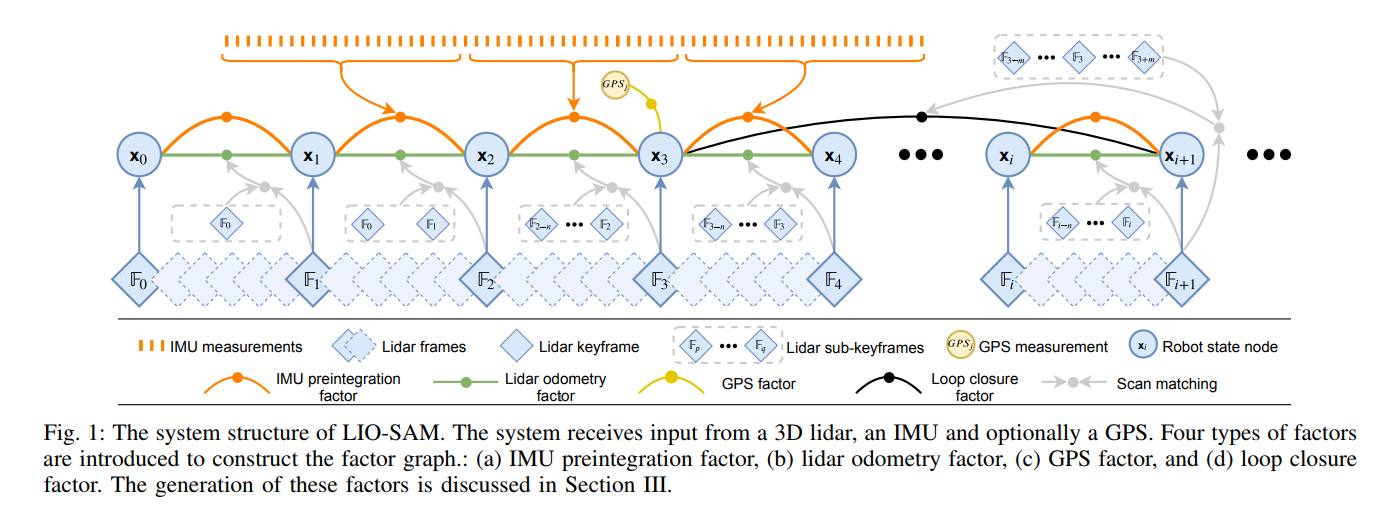
B. IMU Preintegration Factor
角速度, 加速度的测量:
[�egin{array}{l}
hat{�oldsymbol{omega}}_{t}=�oldsymbol{omega}_{t}+mathbf{b}_{t}^{�oldsymbol{omega}}+mathbf{n}_{t}^{�oldsymbol{omega}} \
hat{mathbf{a}}_{t}=mathbf{R}_{t}^{mathbf{B W}}left(mathbf{a}_{t}-mathbf{g}
ight)+mathbf{b}_{t}^{mathbf{a}}+mathbf{n}_{t}^{mathbf{a}},
end{array}
]
这里 (hat{omega}_t) 和 (hat{a}_t) 是 raw 测量在 (B) 系.
速度, 位置和旋转在 (t+Delta t)时刻如下:
[�egin{aligned}
mathbf{v}_{t+Delta t}=mathbf{v}_{t}+mathbf{g} Delta t+mathbf{R}_{t}left(hat{mathbf{a}}_{t}-mathbf{b}_{t}^{mathbf{a}}-mathbf{n}_{t}^{mathbf{a}}
ight) Delta t \
mathbf{p}_{t+Delta t}=mathbf{p}_{t}+mathbf{v}_{t} Delta t+frac{1}{2} mathbf{g} Delta t^{2} \
&+frac{1}{2} mathbf{R}_{t}left(hat{mathbf{a}}_{t}-mathbf{b}_{t}^{mathbf{a}}-mathbf{n}_{t}^{mathbf{a}}
ight) Delta t^{2} \
mathbf{R}_{t+Delta t}=mathbf{R}_{t} exp left(left(hat{�oldsymbol{omega}}_{t}-mathbf{b}_{t}^{omega}-mathbf{n}_{t}^{omega}
ight) Delta t
ight)
end{aligned}
]
这里 (R_t = R_t^{WB} = R_t^{{BW}^T}). 这里我们假设 角速度 和 加速度 的(B) 保持不变.
C. LiDAR Odometry Factor
当一个新的scan到达时, 我们先做特征提取. Edge / planar 特征被提取来估计局部点的roughness. 有大的 roughness值的实被分类为edge, 值小的就是planar特征.
1. Sub-keyframes for voxel map
2. Scan-matching
3. Relative transform
edge点和平面点对应如下:
[�egin{array}{r}
mathbf{d}_{e_{k}}=frac{left|left(mathbf{p}_{i+1, k}^{e}-mathbf{p}_{i, u}^{e}
ight) imesleft(mathbf{p}_{i+1, k}^{e}-mathbf{p}_{i, v}^{e}
ight)
ight|}{left|mathbf{p}_{i, u}^{e}-mathbf{p}_{i, v}^{e}
ight|} \
mathbf{d}_{p_{k}}=frac{left(mathbf{p}_{i, u}^{p}-mathbf{p}_{i, v}^{p}
ight) imesleft(mathbf{p}_{i, u}^{p}-mathbf{p}_{i, w}^{p}
ight) mid}{left|left(mathbf{p}_{i, u}^{p}-mathbf{p}_{i, v}^{p}
ight) imesleft(mathbf{p}_{i, u}^{p}-mathbf{p}_{i, w}^{p}
ight)
ight|}
end{array}
]
D. GPS Factor
当收到GPS测量的时候, 我会先转换到局部笛卡尔坐标系.
一般我们只有在估计的位置协方差大于接受的GPS位置协方差的时候才加入 GPS factor.
E. Loop Closure Factor
...
4. Experiments
我们比较了LIO-SAM, LOAM和LIOM. LIO-SAM和LOAM是专注在实时的输出, 而LIOM是有无限的时间处理的.
A. Rotation Dataset
遇到的最大的旋转速度是 133.7°/s.
B. Walking Dataset
LIOM只跑了0.56x的实时.
C. Campus Dataset
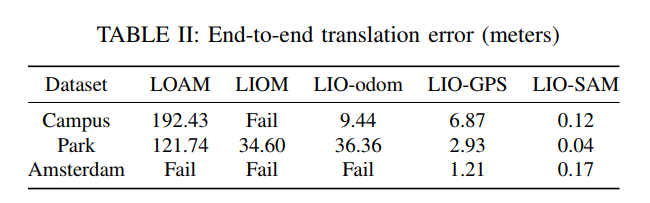
D. Park Dataset
...
E. Amsterdam Dataset
....
F. Benchmarking Results
...
5. Conclusions and Discussion
没啥.