ESRGAN是在SRGAN基础上进行增强的网络, 在2018年的比赛中获得了冠军
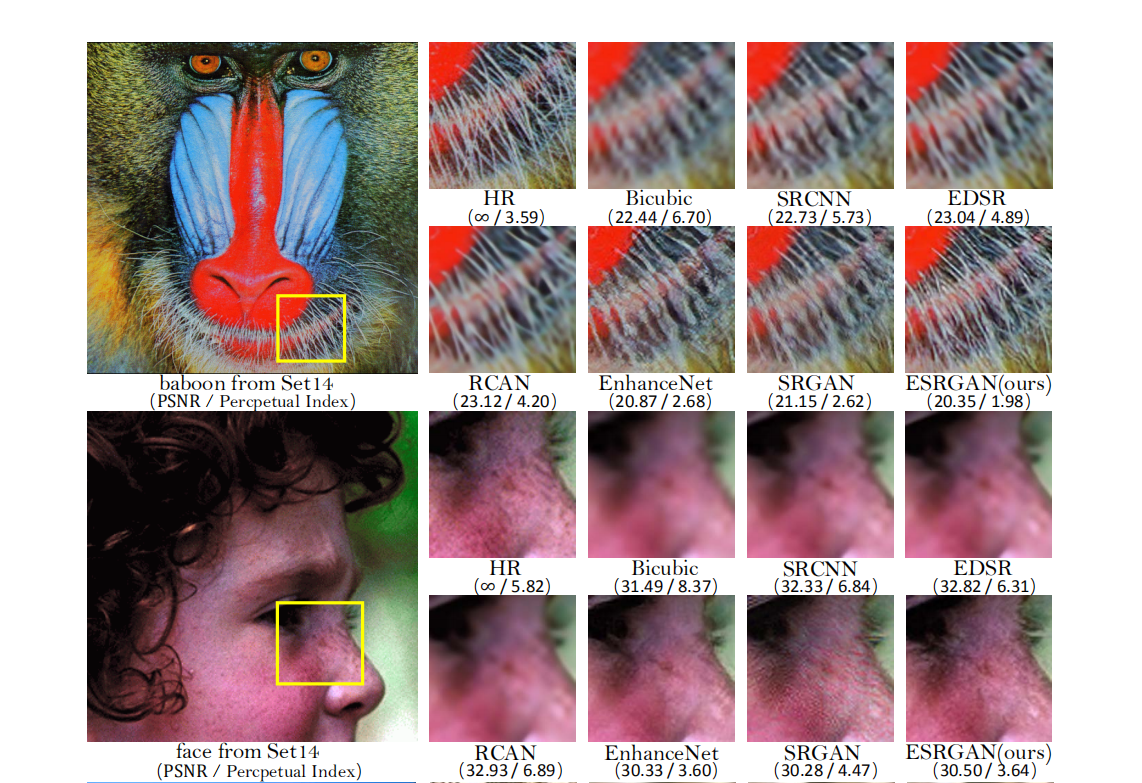
Introduction 介绍了基于PSNR指标获得的超分辨图像其结果会较为平滑,且与人们的主观有较大的差别
作者针对SRGAN提出了3个改进的点
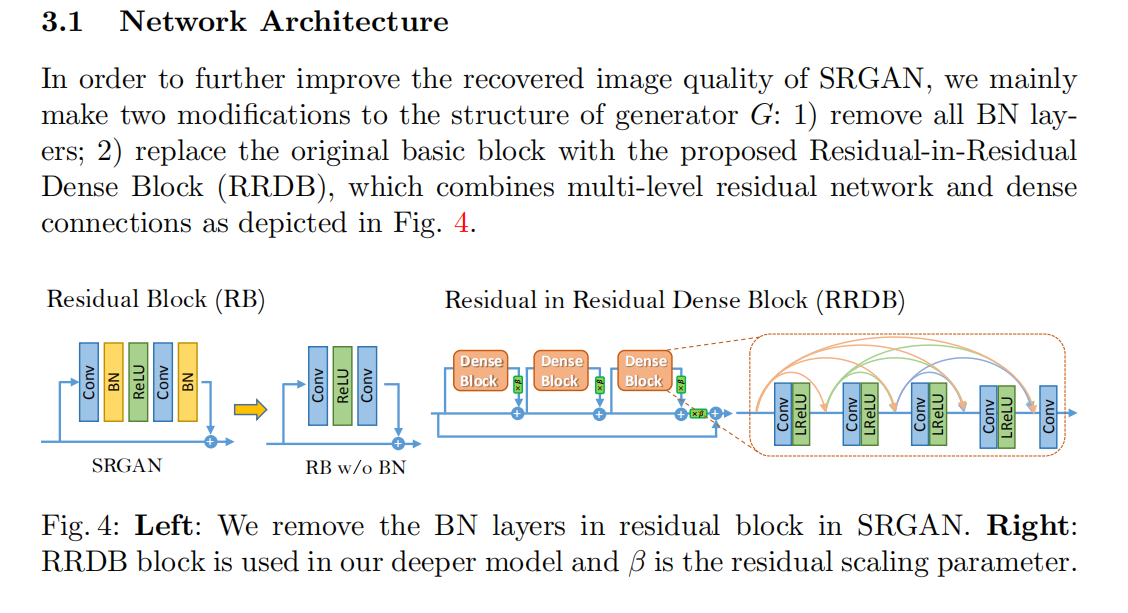
第一点: 使用了RDDB网络结构, 这种层叠式的网络结构更容易表达效果
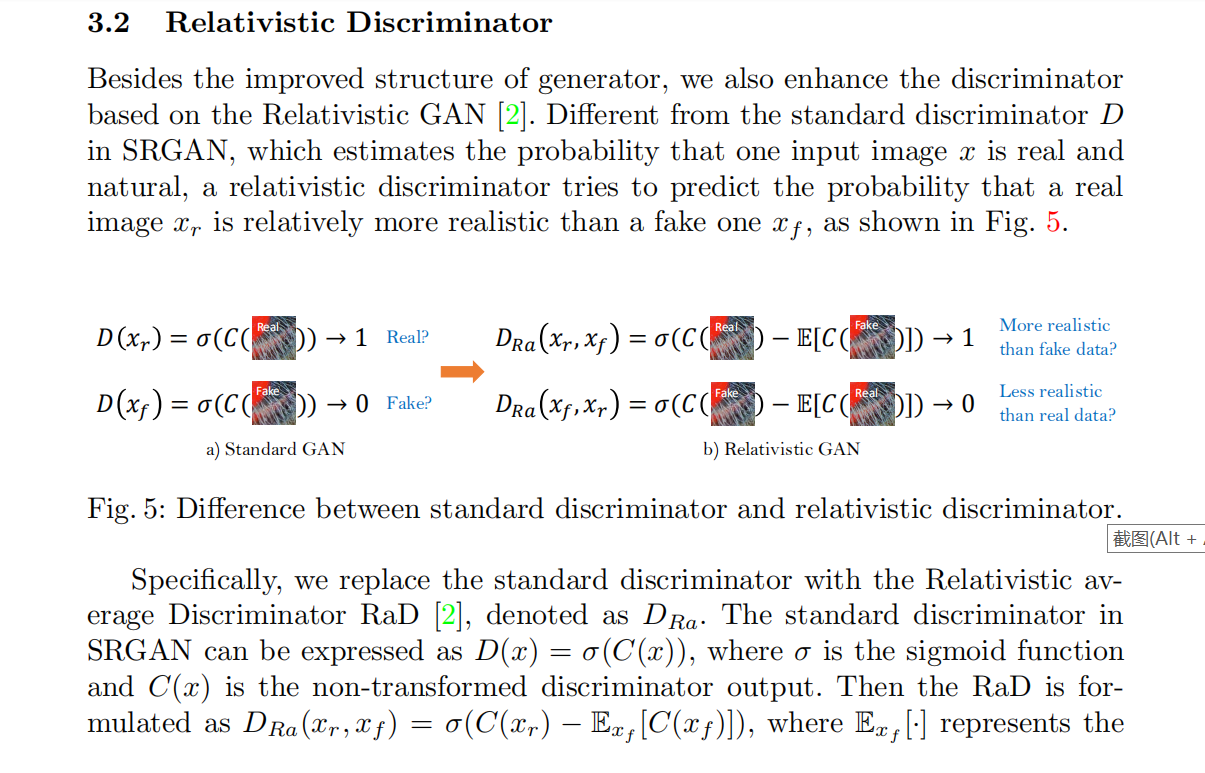
第二点: 使用RaGAN对抗网络, 这种网络在优化生成器的时候,将判别真实图片的概率值考虑了进来
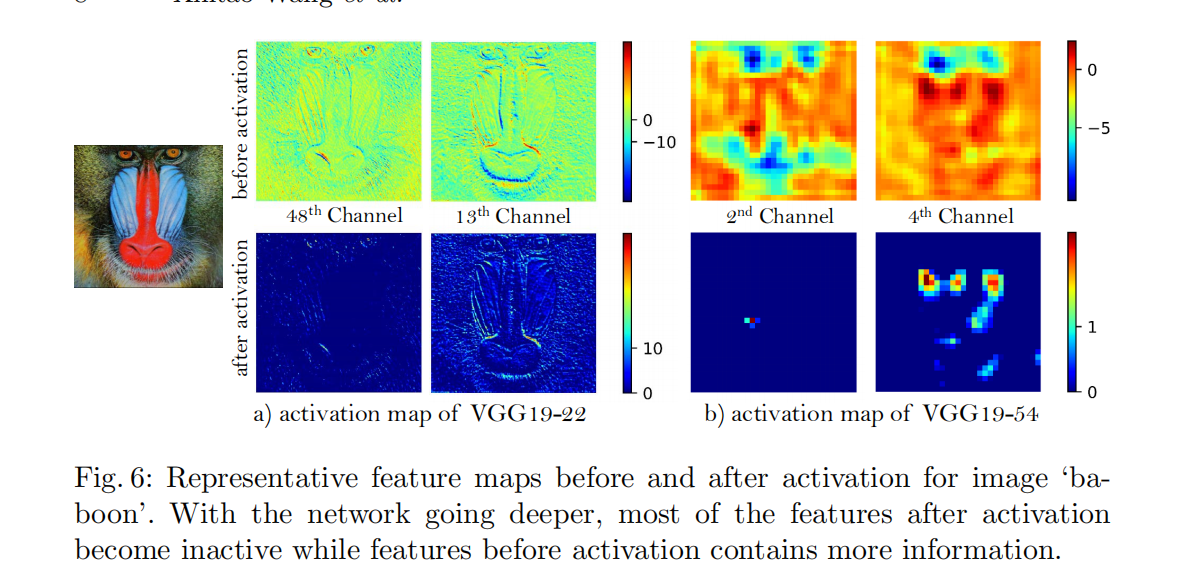
第三点:对于VGG生成的语义纹理损失值,使用了relu之前的输出结果,进行比较
因为PSNR和SSIM的指标与人眼的视觉指标存在差异,因此作者使用了竞赛中的指标 perceptual index
作者进行改进的点: 第一个在网络结构上的改进,使用了RRDB层
RRDB代码: 先进入class RRDBNet,然后调转到class RRDB,最后跳转到class ResidualDenseBlock
import functools import torch import torch.nn as nn import torch.nn.functional as F import models.modules.module_util as mutil class ResidualDenseBlock_5C(nn.Module): def __init__(self, nf=64, gc=32, bias=True): super(ResidualDenseBlock_5C, self).__init__() # gc: growth channel, i.e. intermediate channels self.conv1 = nn.Conv2d(nf, gc, 3, 1, 1, bias=bias) self.conv2 = nn.Conv2d(nf + gc, gc, 3, 1, 1, bias=bias) self.conv3 = nn.Conv2d(nf + 2 * gc, gc, 3, 1, 1, bias=bias) self.conv4 = nn.Conv2d(nf + 3 * gc, gc, 3, 1, 1, bias=bias) self.conv5 = nn.Conv2d(nf + 4 * gc, nf, 3, 1, 1, bias=bias) self.lrelu = nn.LeakyReLU(negative_slope=0.2, inplace=True) # initialization mutil.initialize_weights([self.conv1, self.conv2, self.conv3, self.conv4, self.conv5], 0.1) def forward(self, x): x1 = self.lrelu(self.conv1(x)) x2 = self.lrelu(self.conv2(torch.cat((x, x1), 1))) x3 = self.lrelu(self.conv3(torch.cat((x, x1, x2), 1))) x4 = self.lrelu(self.conv4(torch.cat((x, x1, x2, x3), 1))) x5 = self.conv5(torch.cat((x, x1, x2, x3, x4), 1)) return x5 * 0.2 + x class RRDB(nn.Module): '''Residual in Residual Dense Block''' def __init__(self, nf, gc=32): super(RRDB, self).__init__() self.RDB1 = ResidualDenseBlock_5C(nf, gc) self.RDB2 = ResidualDenseBlock_5C(nf, gc) self.RDB3 = ResidualDenseBlock_5C(nf, gc) def forward(self, x): out = self.RDB1(x) out = self.RDB2(out) out = self.RDB3(out) return out * 0.2 + x class RRDBNet(nn.Module): def __init__(self, in_nc, out_nc, nf, nb, gc=32): super(RRDBNet, self).__init__() RRDB_block_f = functools.partial(RRDB, nf=nf, gc=gc) self.conv_first = nn.Conv2d(in_nc, nf, 3, 1, 1, bias=True) # 进行第一次的卷积 self.RRDB_trunk = mutil.make_layer(RRDB_block_f, nb) # 添加RRDB残差块 self.trunk_conv = nn.Conv2d(nf, nf, 3, 1, 1, bias=True) # 再次进行卷积操作 #### upsampling self.upconv1 = nn.Conv2d(nf, nf, 3, 1, 1, bias=True) self.upconv2 = nn.Conv2d(nf, nf, 3, 1, 1, bias=True) self.HRconv = nn.Conv2d(nf, nf, 3, 1, 1, bias=True) self.conv_last = nn.Conv2d(nf, out_nc, 3, 1, 1, bias=True) self.lrelu = nn.LeakyReLU(negative_slope=0.2, inplace=True) def forward(self, x): fea = self.conv_first(x) trunk = self.trunk_conv(self.RRDB_trunk(fea)) fea = fea + trunk fea = self.lrelu(self.upconv1(F.interpolate(fea, scale_factor=2, mode='nearest'))) fea = self.lrelu(self.upconv2(F.interpolate(fea, scale_factor=2, mode='nearest'))) out = self.conv_last(self.lrelu(self.HRconv(fea))) return out
作者进行改进的点: 第二个在使用了RaGan对抗生成网络,对于判别器和生成器使用相对概率
对于生成器的ragan损失值,即
真实图片相对于虚假图片判断为假的损失值
虚假图片相对于真实图片判别为真的损失值
pred_g_fake = self.netD(self.fake_H) # 判别生成的图片 if self.opt['train']['gan_type'] == 'gan': l_g_gan = self.l_gan_w * self.cri_gan(pred_g_fake, True) elif self.opt['train']['gan_type'] == 'ragan': pred_d_real = self.netD(self.var_ref).detach() # 判别真实的图片的概率值 l_g_gan = self.l_gan_w * ( self.cri_gan(pred_d_real - torch.mean(pred_g_fake), False) + # self.cri_gan(pred_g_fake - torch.mean(pred_d_real), True)) / 2 # 生成的图片比真实图片更加的真实
l_g_total += l_g_gan
对于判别器的ragan损失值,即
真实图片相对于虚假图片判别为真的损失值
虚假图片相对于真实图片判别为假的损失值
pred_d_real = self.netD(self.var_ref) pred_d_real = self.netD(self.var_ref) pred_d_fake = self.netD(self.fake_H.detach()) # detach to avoid BP to G if self.opt['train']['gan_type'] == 'gan': l_d_real = self.cri_gan(pred_d_real, True) l_d_fake = self.cri_gan(pred_d_fake, False) l_d_total = l_d_real + l_d_fake elif self.opt['train']['gan_type'] == 'ragan': l_d_real = self.cri_gan(pred_d_real - torch.mean(pred_d_fake), True) l_d_fake = self.cri_gan(pred_d_fake - torch.mean(pred_d_real), False) l_d_total = (l_d_real + l_d_fake) / 2
作者进行改进的点: 第二个使用vgg进行纹理细节提取时,使用最后一层conv的relu之前的输出结果
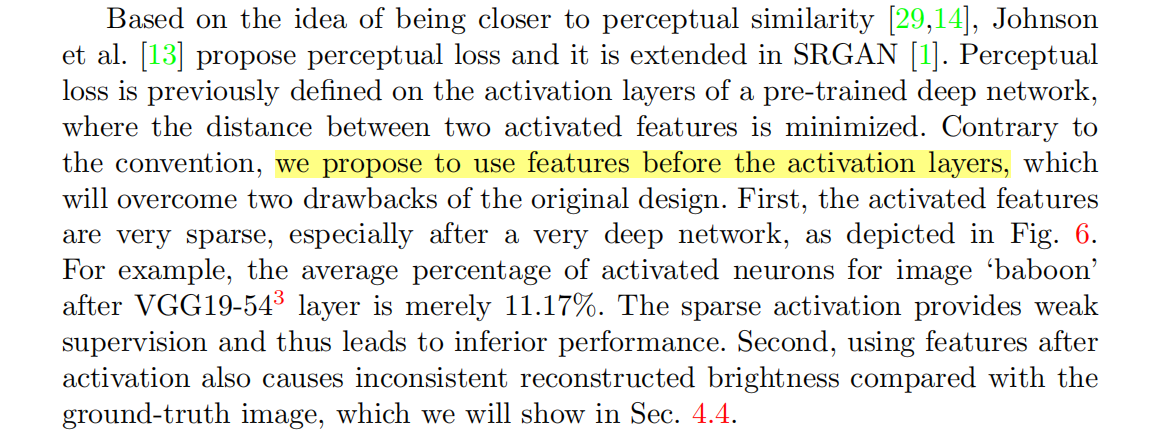
作者对最后一层的conv输出和relu输出做了可视化结果比对
将vgg损失值进行添加
if self.cri_fea: # feature loss real_fea = self.netF(self.var_H).detach() # 表示真实图片的VGG损失值 fake_fea = self.netF(self.fake_H) # l_g_fea = self.l_fea_w * self.cri_fea(fake_fea, real_fea) # 构建L1损失值 l_g_total += l_g_fea
这里使用的是vgg19的不带bn的输出
class VGGFeatureExtractor(nn.Module): def __init__(self, feature_layer=34, use_bn=False, use_input_norm=True, device=torch.device('cpu')): super(VGGFeatureExtractor, self).__init__() self.use_input_norm = use_input_norm if use_bn: model = torchvision.models.vgg19_bn(pretrained=True) else: model = torchvision.models.vgg19(pretrained=False) if self.use_input_norm: mean = torch.Tensor([0.485, 0.456, 0.406]).view(1, 3, 1, 1).to(device) # [0.485 - 1, 0.456 - 1, 0.406 - 1] if input in range [-1, 1] std = torch.Tensor([0.229, 0.224, 0.225]).view(1, 3, 1, 1).to(device) # [0.229 * 2, 0.224 * 2, 0.225 * 2] if input in range [-1, 1] self.register_buffer('mean', mean) # 构建处理步骤的名字 self.register_buffer('std', std) self.features = nn.Sequential(*list(model.features.children())[:(feature_layer + 1)]) # No need to BP to variable for k, v in self.features.named_parameters(): v.requires_grad = False # 为了防止梯度进行更新 def forward(self, x): # Assume input range is [0, 1] if self.use_input_norm: x = (x - self.mean) / self.std output = self.features(x) return output
结果展示
ESRGAN网络在PSNR指标上表现的不是很好,但是在perceptual index上相当于其他方法有突出的表现