参考https://blog.csdn.net/Hanghang_/article/details/104535370
VINS-Mono和ORB-SLAM2对比
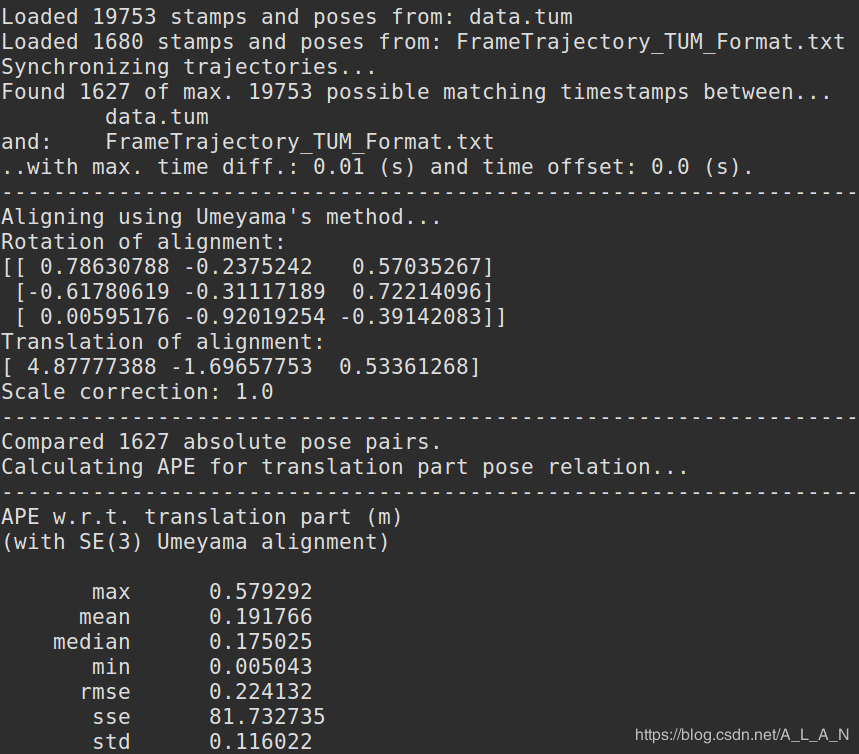
注意在使用evo的ape计算绝对位姿误差时,根据https://blog.csdn.net/A_L_A_N/article/details/88708979有精确的数据给出的
位姿图放在一起的
以两个的比较为例
evo_traj tum /home/***/reconstruction/VINS-Mono/VINS-V1-01-easy/our_method.txt /home/***/reconstruction/ORB-SLAM2/ORB-SLAM2-V1_01_easy/ORB-SLAM2.txt --ref=ground_truth.tum -p --plot_mode=xyz --align --correct_scale
误差分析
只能算法单独和基准值比较得到APE数据再进行比较