行人检测具有极其广泛的应用:智能辅助驾驶,智能监控,行人分析以及智能机器人等领域。从2005年以来行人检测进入了一个快速的发展阶段,但是也存在很多问题还有待解决,主要还是在性能和速度方面还不能达到一个权衡。近年,以谷歌为首的自动驾驶技术的研发正如火如荼的进行,这也迫切需要能对行人进行快速有效的检测,以保证自动驾驶期间对行人的安全不会产生威胁。
1 行人检测的现状
大概可以分为两类
1.1 基于背景建模
利用背景建模方法,提取出前景运动的目标,在目标区域内进行特征提取,然后利用分类器进行分类,判断是否包含行人;背景建模目前主要存在的问题:
1)必须适应环境的变化(比如光照的变化造成图像色度的变化);
2)相机抖动引起画面的抖动(比如手持相机拍照时候的移动);
3)图像中密集出现的物体(比如树叶或树干等密集出现的物体,要正确的检测出来);
4)必须能够正确的检测出背景物体的改变(比如新停下的车必须及时的归为背景物体,而有静止开始移动的物体也需要及时的检测出来)。
5)物体检测中往往会出现Ghost区域,Ghost区域也就是指当一个原本静止的物体开始运动,背静差检测算法可能会将原来该物体所覆盖的区域错误的检测为运动的,这块区域就成为Ghost,当然原来运动的物体变为静止的也会引入Ghost区域,Ghost区域在检测中必须被尽快的消除。
1.2 基于统计学习的方法
这也是目前行人检测最常用的方法,根据大量的样本构建行人检测分类器。提取的特征主要有目标的灰度、边缘、纹理、颜色、梯度直方图等信息。分类器主要包括神经网络、SVM、adaboost以及现在被计算机视觉视为宠儿的深度学习。
统计学习目前存在的难点:
1)行人的姿态、服饰各不相同、复杂的背景、不同的行人尺度以及不同的光照环境。
2)提取的特征在特征空间中的分布不够紧凑;
3)分类器的性能受训练样本的影响较大;
4)离线训练时的负样本无法涵盖所有真实应用场景的情况;
目前的行人检测基本上都是基于法国研究人员Dalal在2005的CVPR发表的HOG+SVM的行人检测算法(Histograms of Oriented Gradients for Human Detection, Navneet Dalel,Bill Triggs, CVPR2005)。HOG+SVM作为经典算法也集成到opencv里面去了,可以直接调用实现行人检测
为了解决速度问题可以采用背景差分法的统计学习行人检测,前提是背景建模的方法足够有效(即效果好速度快),目前获得比较好的检测效果的方法通常采用多特征融合的方法以及级联分类器。(常用的特征有Harry-like、Hog特征、LBP特征、Edgelet特征、CSS特征、COV特征、积分通道特征以及CENTRIST特征)。
2 综述类的文章
2.1 行人检测十年回顾
Ten Years of Pedestrian Detection, What Have We Learned?
一篇2014年ECCV的文章,是对pedestrian detectiond过去十年发展的回顾,从dataset,main approaches的角度分析了近10年的40多篇论文提出的方法,并对提高feature复杂度的影响进行了评估
学习笔记:http://blog.csdn.net/mduke/article/details/46582443
2.2 P.Dollar PAMI 2012上的综述
P.Dollar, C. Wojek,B. Schiele, et al. Pedestrian detection: an evaluation of the state of the art [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2012, 34(4): 743-761.
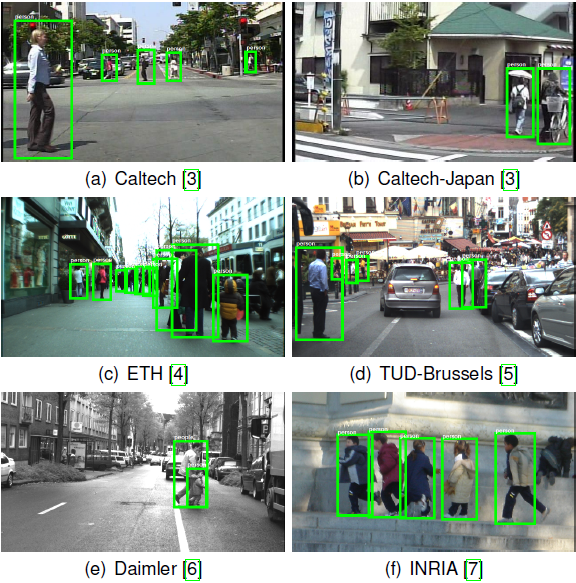
2012年PAMI上发表的一篇关于行人检测的综述性文章,PDF格式,共20页,对常见的16种行人检测算法进行了简单描述,并在6个公开测试库上进行测试,给出了各种方法的优缺点及适用情况。另外,指出了未来行人检测的发展方向和趋势。
下载:http://vision.ucsd.edu/~pdollar/files/papers/DollarPAMI12peds.pdf
2.3 CVPR2010 HOF和CSS
https://www.d2.mpi-inf.mpg.de/CVPR10Pedestrians
New Features and Insights for Pedestrian Detection
文中使用改进的HOG,即HOF和CSS(color self similarity)特征,使用HIK SVM分类器。 本文的作者是德国人:Stefen Walk。目前Stefan Walk在苏黎世联邦理工大学任教。
2.4 Integral Channel Features
加州理工学院2009年行人检测的文章:Integral Channel Features(积分通道特征)
这篇文章与2012年PAMI综述文章是同一作者。作者:Piotr Dollar
Paper下载:http://pages.ucsd.edu/~ztu/publication/dollarBMVC09ChnFtrs_0.pdf
中文笔记:http://blog.csdn.net/carson2005/article/details/8455837
2.5 The Fastest Pedestrian Detector in the West
Dollar 在 2010 年 BMVC 的 《The fastest pedestrian detector in the west》 一文中提出了一种新的思想,这种思想只需要训练一个标准 model,检测 N/K(K ≈10) 然后其余的 N-N/K 种大小的图片的特征不需要再进行这种复杂的计算,而是跟据这 N/K 次的结果, 由另外一种简单的算法给估计出来,这种思想实现的 基础是大小相近的图像的特征可以被足够精确的估计出来
下载:http://vision.ucsd.edu/sites/default/files/FPDW_0.pdf
2.6 DPM算法做目标检测
CVPR2008:A Discriminatively Trained, Multiscale, Deformable Part Model
PAMI2010:Object Detection with Discriminatively Trained Part Based Models
CVPR2010:Cascade Object Detection with Deformable Part Models
以上三篇文章,都是作者研究DPM算法做目标检测的文章,有源代码可以下载。
作者的个人主页:http://cs.brown.edu/~pff/papers/
2.7 利用DPM模型,检测粘连
Detection and Tracking of Occluded People
IJCV2014年的文章,利用DPM模型,检测粘连情况很严重的行人,效果很好。
下载:http://www.bmva.org/bmvc/2012/BMVC/paper009/
2.8 UDN算法
ICCV2013:
1)Joint Deep Learning for Pedestrian Detection
2)Multi-Stage Contextual Deep Learning for Pedestrian Detection
简 称UDN算法,从文中描述的检测效果来看,该方法是所有方法中最好的,并且,效果远超过其他方法。经过对论文和该算法源码的研究,该算法是与作者另外一篇 论文的方法 ,另外的论文算法做图片扫描,得到矩形框,然后用该方法对矩形框进行进一步确认,以及降低误警率和漏警率。另外的论文是:Multi-Stage Contextual Deep Learning for Pedestrian Detection。
这篇文章是用深度学习的CNN做candidate window的确认。而主要的行人检测的算法还是HOG+CSS+adaboost。
香港中文大学,Joint Deep Learning for Pedestrian Detection,行人检测论文的相关资源:http://www.ee.cuhk.edu.hk/~wlouyang/projects/ouyangWiccv13Joint/index.html
2.9 Monocular pedestrian detection
Enzweiler, and D.Gavrila. Monocular pedestrian detection: survey and experiments [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009, 31(12): 2179-2195.
下载:http://www.gavrila.net/pami09.pdf
2.10 Survey of pedestrian detection for advanced driver assistance systems
Geronimo, A. M.Lopez and A. D. Sappa, et al. Survey of pedestrian detection for advanced driver assistance systems [J]. IEEE Transactionson Pattern Analysis and Machine Intelligence, 2010, 32(7): 1239-1258.
2.11 Vision-based Pedestrian Protection Systems for Intelligent Vehicles
Geronimo, and A. M.Lopez. Vision-based Pedestrian Protection Systems for Intelligent Vehicles, BOOK, 2014.
下载:http://bookzz.org/book/2167094/e21639
2.12 行人检测技术综述
苏松志, 李绍滋, 陈淑媛等. 行人检测技术综述[J]. 电子学报, 2012, 40(4): 814-820.
下载:行人检测技术综述
2.13 车辆辅助驾驶系统中基于计算机视觉的行人检测研究综述
贾慧星, 章毓晋.车辆辅助驾驶系统中基于计算机视觉的行人检测研究综述[J], 自动化学报, 2007, 33(1): 84-90.
2.14 行人检测系统研究新进展及关键技术展望
许言午, 曹先彬,乔红. 行人检测系统研究新进展及关键技术展望[J], 电子学报, 2008, 36(5): 368-376.
2.15 基于视觉的人的运动识别综述
杜友田; 陈峰;徐文立; 李永彬;基于视觉的人的运动识别综述, 电子学报, 2007. 35(1): 84-90.
2.16 基于机器学习的行人检测关键技术研究
朱文佳. 基于机器学习的行人检测关键技术研究[D]. 第一章, 硕士学位论文, 上海交通大学. 2008. 指导教师: 戚飞虎.
参考:http://hi.baidu.com/susongzhi/item/085983081b006311eafe38e7
参考:http://blog.csdn.net/dpstill/article/details/22420065
声明:
如果转载了本文,也请注明转载出处:http://www.cvrobot.net/pedestrian-detection-resource-1-summary-review-survey/
如果您对该机器学习、图像视觉算法技术感兴趣,可以关注新浪微博:视觉机器人 或者加入 QQ群:137138915
欢迎投稿或者推荐好的内容~~