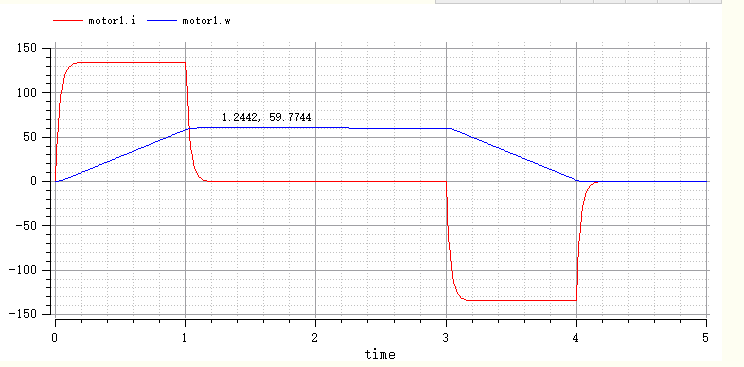
本次调速仿真采用PID调节。首先要确定PID中的各项设计参数,仿真过程中采用临界比例度法确定了大概的Kp值。在若干次调整的过程中,发现加入微分环节后调整时间略有上升,故采用PI调节。调整参数确定为Kp=75,Ki=22。控制器部分的程序如下图所示。原理图如下
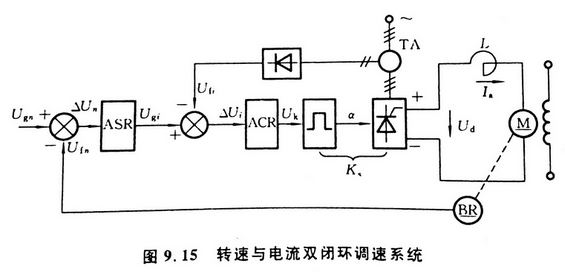
ASR和ACR调节器均使用PI控制器,控制程序如下

代码如下:
type ElectricPotential = Real;
type ElectricCurrent = Real(quantity = "ElectricCurrent", unit = "A");
type Resistance = Real(quantity = "Resistance", unit = "Ohm", min = 0);
type Inductance = Real(quantity = "Inductance", unit = "H", min = 0);
type Voltage = ElectricPotential;
type Current = ElectricCurrent;
type Force = Real(quantity = "Force", unit = "N");
type Angle = Real(quantity = "Angle", unit = "rad", displayUnit = "deg");
type Torque = Real(quantity = "Torque", unit = "N.m");
type AngularVelocity = Real(quantity = "AngularVelocity", unit = "rad/s", displayUnit = "rev/min");
type AngularAcceleration = Real(quantity = "AngularAcceleration", unit = "rad/s2");
type MomentOfInertia = Real(quantity = "MomentOfInertia", unit = "kg.m2");
type Time = Real (final quantity="Time", final unit="s");
connector RotFlange_a "1D rotational flange (filled square)"
Angle phi "Absolute rotational angle of flange";
flow Torque tau "Torque in the flange";
end RotFlange_a; //From Modelica.Mechanical.Rotational.Interfaces
connector RotFlange_b "1D rotational flange (filled square)"
Angle phi "Absolute rotational angle of flange";
flow Torque tau "Torque in the flange";
end RotFlange_b; //From Modelica.Mechanical.Rotational.Interfaces
connector Pin "Pin of an electrical component"
Voltage v "Potential at the pin";
flow Current i "Current flowing into the pin";
end Pin; //From Modelica.Electrical.Analog.Interfaces
connector PositivePin "Positive pin of an electrical component"
Voltage v "Potential at the pin";
flow Current i "Current flowing into the pin";
end PositivePin; //From Modelica.Electrical.Analog.Interfaces
connector NegativePin "Negative pin of an electrical component"
Voltage v "Potential at the pin";
flow Current i "Current flowing into the pin";
end NegativePin; //From Modelica.Electrical.Analog.Interfaces
connector InPort "Connector with input signals of type Real"
parameter Integer n = 1 "Dimension of signal vector";
input Real signal[n] "Real input signals";
end InPort; // From Modelica.Blocks.Interfaces
connector OutPort "Connector with output signals of type Real"
parameter Integer n = 1 "Dimension of signal vector";
output Real signal[n] "Real output signals";
end OutPort; // From Modelica.Blocks.Interfaces
partial model Rigid // Rotational class Rigid
"Base class for the rigid connection of two rotational 1D flanges"
Angle phi "Absolute rotation angle of component";
RotFlange_a rotFlange_a "(left) driving flange (axis directed into plane)";
RotFlange_b rotFlange_b "(right) driven flange (axis directed out of plane)";
equation
rotFlange_a.phi = phi;
rotFlange_b.phi = phi;
end Rigid; // From Modelica.Mechanics.Rotational.Interfaces
model Inertia "1D rotational component with inertia"
extends Rigid;
parameter MomentOfInertia J = 1 "Moment of inertia";
AngularVelocity w "Absolute angular velocity of component";
AngularAcceleration a "Absolute angular acceleration of component";
equation
w = der(phi);
a = der(w);
J*a = rotFlange_a.tau + rotFlange_b.tau;
end Inertia; //From Modelica.Mechanics.Rotational
partial model TwoPin // Same as OnePort in Modelica.Electrical.Analog.Interfaces
"Component with two electrical pins p and n and current i from p to n"
Voltage v "Voltage drop between the two pins (= p.v - n.v)";
Current i "Current flowing from pin p to pin n";
PositivePin p;
NegativePin n;
equation
v = p.v - n.v;
0 = p.i + n.i;
i = p.i;
end TwoPin;
model DCMotor "DC Motor"
extends TwoPin;
extends Rigid;
OutPort SensorVelocity(n=1);
OutPort SensorCurrent(n=1);
parameter MomentOfInertia J"Total Inertia";
parameter Resistance R"Armature Resistance";
parameter Inductance L"Armature Inductance";
parameter Real Kt"Torque Constant";
parameter Real Ke"EMF Constant";
AngularVelocity w "Angular velocity of motor";
AngularAcceleration a "Absolute angular acceleration of motor";
Torque tau_motor;
RotFlange_b rotFlange_b; // Rotational Flange_b
equation
w = der(rotFlange_b.phi);
a = der(w);
v = R*i+Ke*w+L*der(i);
tau_motor = Kt*i;
J*a = tau_motor + rotFlange_b.tau;
SensorVelocity.signal[1] = w;
SensorCurrent.signal[1] =i;
end DCMotor;
class Resistor "Ideal linear electrical Resistor"
extends TwoPin; // Same as OnePort
parameter Real R(unit = "Ohm") "Resistance";
equation
R*i = v;
end Resistor; // From Modelica.Electrical.Analog.Basic
class Inductor "Ideal linear electrical Inductor"
extends TwoPin; // Same as OnePort
parameter Real L(unit = "H") "Inductance";
equation
v = L*der(i);
end Inductor; // From Modelica.Electrical.Analog.Basic
class Ground "Ground node"
Pin p;
equation
p.v = 0;
end Ground; // From Modelica.Electrical.Analog.Basic
model PWMVoltageSource
extends TwoPin;
InPort Command(n=1);
parameter Time T = 0.003;
parameter Voltage Vin = 200;
equation
T*der(v)+ v = Vin*Command.signal[1]/10;
end PWMVoltageSource;
block Controller
InPort command(n=1);
InPort feedback(n=1);
OutPort outPort(n=1);
Real error;
Real pout;
Real intU;
parameter Real Kp=70;
parameter Real Ki=20;
equation
error = command.signal[1] - feedback.signal[1];
error =der(intU);
pout = Kp * error+Ki*intU;
outPort.signal[1] = pout;
end Controller;
block CommandSignalGenerator
OutPort outPort(n=1);
Real acc;
equation
if time <= 1 then
acc =60;
elseif time <3 then
acc = 0;
elseif time <4 then
acc = -60;
else
acc = 0;
end if;
der(outPort.signal[1]) = acc;
end CommandSignalGenerator;
model DCMotorControlSystem
Ground ground1;
Inertia inertia1(J = 3, w(fixed = true));
DCMotor motor1(J = 1,R = 0.6,L = 0.01,Kt=1.8, Ke=1.8,rotFlange_b(phi(fixed = true)));
CommandSignalGenerator sg1;
Controller con1;
Controller con2;
PWMVoltageSource PowerSource1;
equation
connect(sg1.outPort, con1.command);
connect(con1.feedback, motor1.SensorVelocity);
connect(con1.outPort, con2.command);
connect(motor1.SensorCurrent,con2.feedback);
connect(con2.outPort, PowerSource1.Command);
connect(PowerSource1.p, motor1.p);
connect(motor1.rotFlange_b, inertia1.rotFlange_a);
connect(PowerSource1.n, ground1.p);
connect(ground1.p, motor1.n);
end DCMotorControlSystem;
调节出的曲线