备注机器人类型
export TURTLEBOT3_MODEL=burger
机器人端
echo 'export ROS_DOMAIN_ID=30 #TURTLEBOT3' >> ~/.bashrc
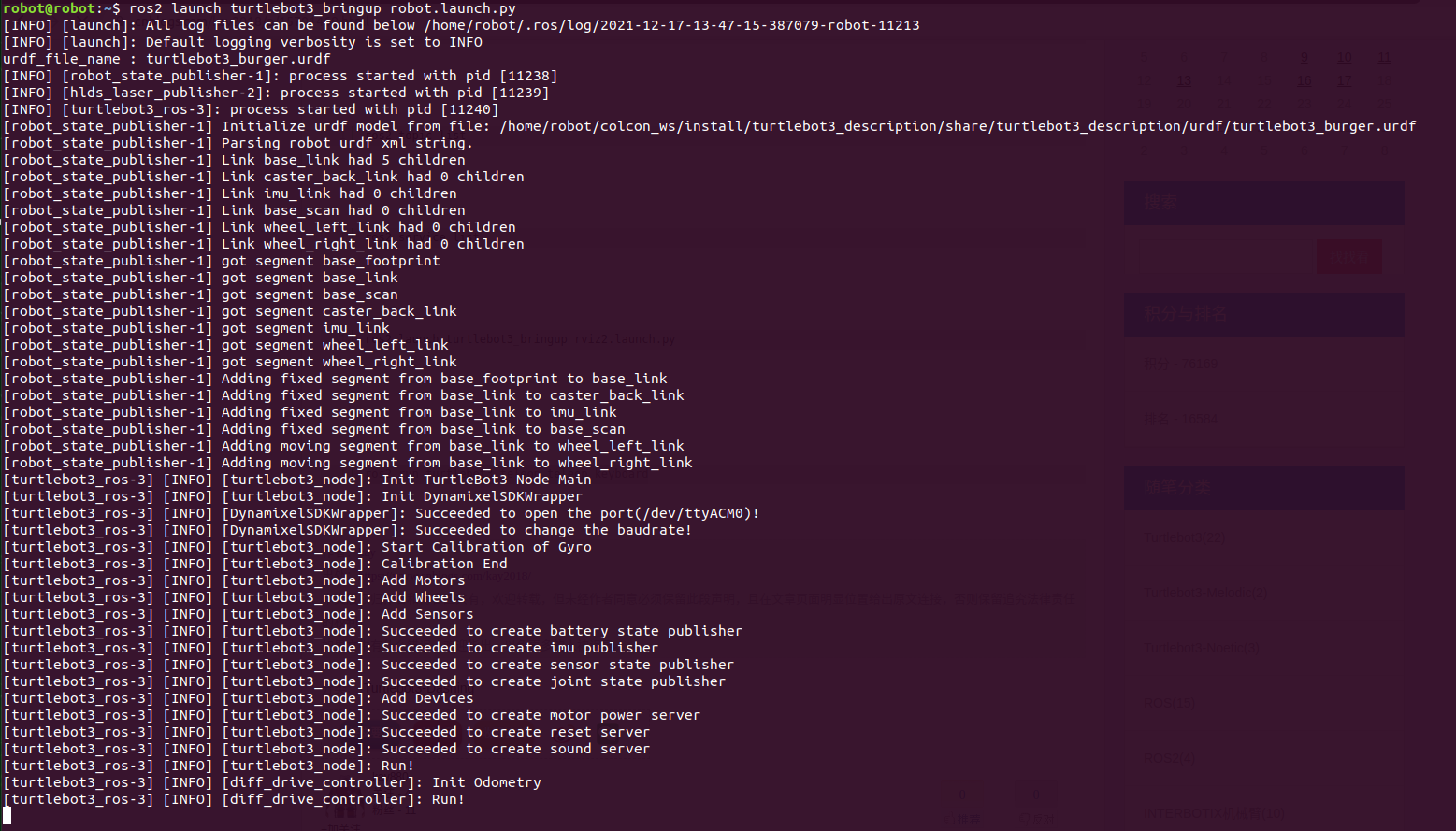
ros2 launch turtlebot3_bringup robot.launch.py
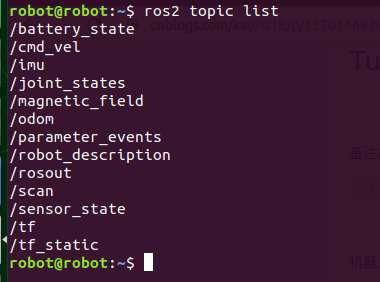
ros2 topic list
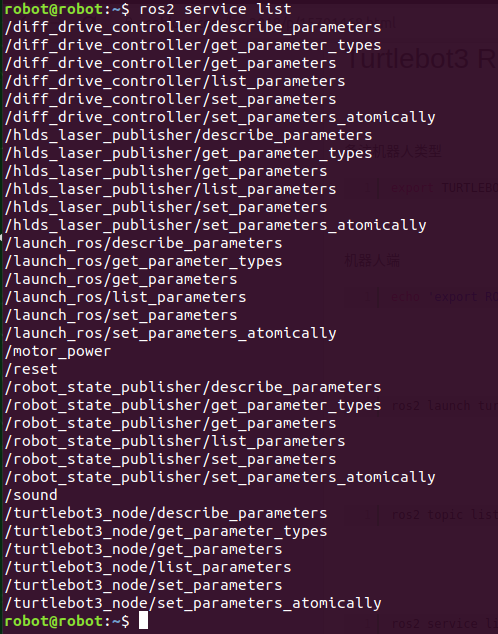
ros2 service list
ros2 launch turtlebot3_bringup rviz2.launch.py
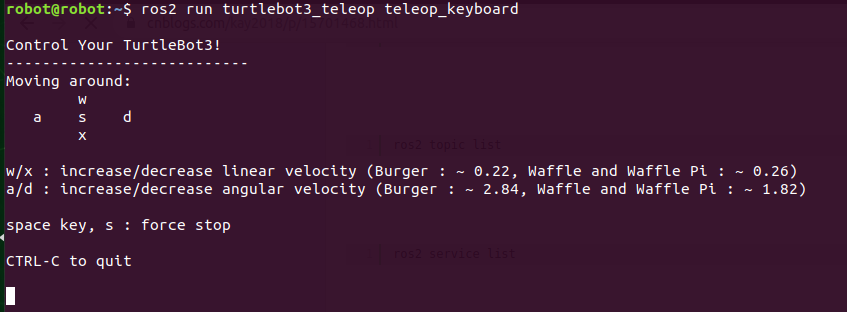
ros2 run turtlebot3_teleop teleop_keyboard
SLAM
ros2 launch turtlebot3_bringup robot.launch.py
ros2 launch turtlebot3_cartographer cartographer.launch.py
ros2 run nav2_map_server map_saver -f ~/map