前言
算法流程
对于首次检测结果,创建跟踪轨迹;
对于之后的每次检测结果,
$D_f$:置信度大于$\sigma_l$的检测结果;
对于每一个激活轨迹,
$d_{best} = d_j$where $max(IOU(d_j, t_i)), d_j \in D_f$
如果$IOU(d_{best}, t_i) \ge \sigma_{IOU}$
add $d_{best}$to$t_i$
remove $d_{best}$ from $D_f$
否则,
如果 $highest\_score(t_i) \geq \sigma_h$ and $len(t_i) \ge t_{min}:$
add $t_i $ to $T_f$
remove $t_i$ from $T_a$
对于 $d_j \in D_f :$
start new track $t$with $d_j$and add to $T_a$
返回 $T_a$
流程图
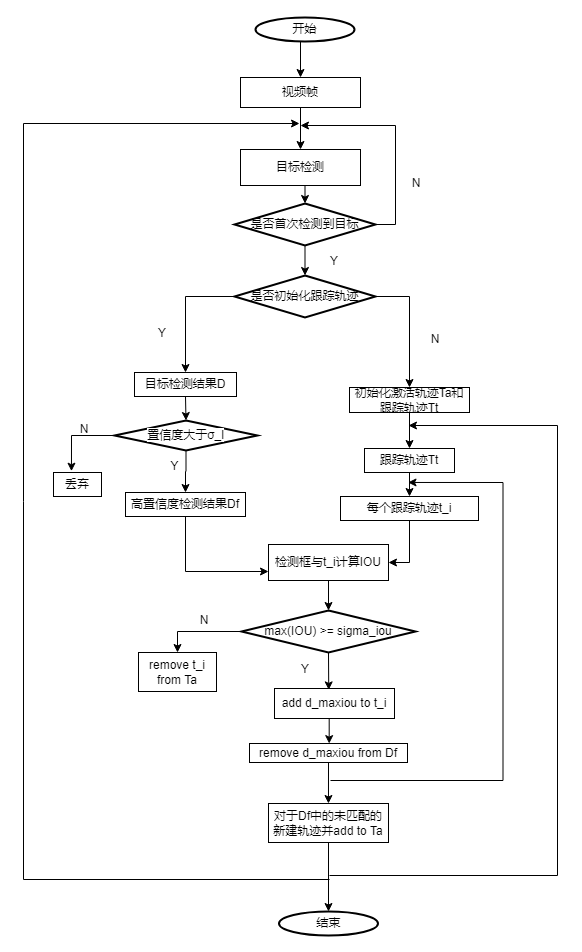
也就是最后系统给出的是激活的轨迹$T_a$,而$T_f$是系统已完成跟踪的历史所有轨迹,已经结束并不是当前轨迹,所以当前帧的输出轨迹应该是$T_a$,也就是如果想要当前帧的跟踪轨迹,就和$T_f$无关,也不用关注$T_f$。
参考
1.
完