预测的输入和输出
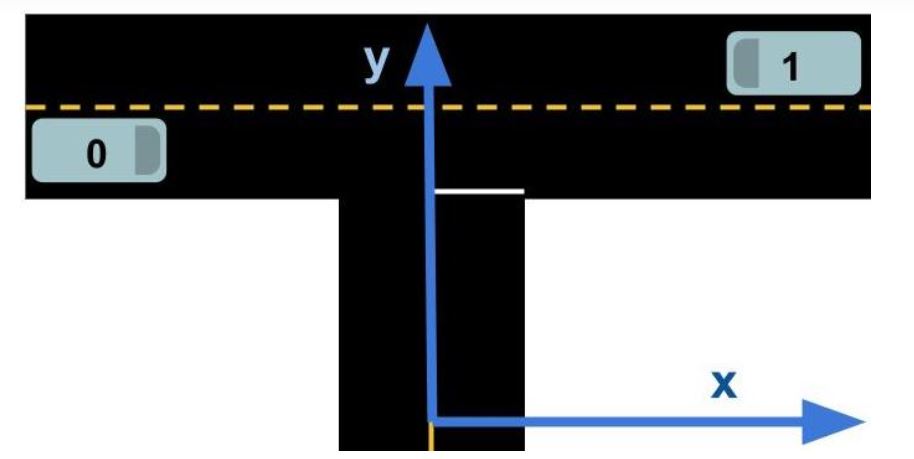
预测模块使用来自传感器融合的地图和数据来生成关于所有其他动态对象可能做的预测。为了更清楚地说明,我们来看一个预测输入和输出的例子(json格式)。
示例输入 - 传感器融合
{
"timestamp" : 34512.21,
"vehicles" : [
{
"id" : 0,
"x" : -10.0,
"y" : 8.1,
"v_x" : 8.0,
"v_y" : 0.0,
"sigma_x" : 0.031,
"sigma_y" : 0.040,
"sigma_v_x" : 0.12,
"sigma_v_y" : 0.03,
},
{
"id" : 1,
"x" : 10.0,
"y" : 12.1,
"v_x" : -8.0,
"v_y" : 0.0,
"sigma_x" : 0.031,
"sigma_y" : 0.040,
"sigma_v_x" : 0.12,
"sigma_v_y" : 0.03,
},
]
}
示例输出
{
"timestamp" : 34512.21,
"vehicles" : [
{
"id" : 0,
"length": 3.4,
"width" : 1.5,
"predictions" : [
{
"probability" : 0.781,
"trajectory" : [
{
"x": -10.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34512.71
},
{
"x": -6.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34513.21
},
{
"x": -2.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34513.71
},
{
"x": 2.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34514.21
},
{
"x": 6.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34514.71
},
{
"x": 10.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34515.21
},
]
},
{
"probability" : 0.219,
"trajectory" : [
{
"x": -10.0,
"y": 8.1,
"yaw": 0.0,
"timestamp": 34512.71
},
{
"x": -7.0,
"y": 7.5,
"yaw": -5.2,
"timestamp": 34513.21
},
{
"x": -4.0,
"y": 6.1,
"yaw": -32.0,
"timestamp": 34513.71
},
{
"x": -3.0,
"y": 4.1,
"yaw": -73.2,
"timestamp": 34514.21
},
{
"x": -2.0,
"y": 1.2,
"yaw": -90.0,
"timestamp": 34514.71
},
{
"x": -2.0,
"y":-2.8,
"yaw": -90.0,
"timestamp": 34515.21
},
]
}
]
},
{
"id" : 1,
"length": 3.4,
"width" : 1.5,
"predictions" : [
{
"probability" : 1.0,
"trajectory" : [
{
"x": 10.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34512.71
},
{
"x": 6.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34513.21
},
{
"x": 2.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34513.71
},
{
"x": -2.0,
"y": 12.1,
"yaw": -180.0,
"timestamp": 34514.21
},
{
"x": -6.0,
"y": 12.1,
"