
今天来讲一讲我开发SmartTimer的思路。在上一篇介绍SmartTimer的文章《SmartTImer——一个基于STM32的时钟管理器》中,我提到了要实现延迟XX毫秒执行XX函数的功能,比较好的方式是在定时器中断中设置溢出标志,而在程序主循环中检测这个标志,如果标志置位则运行回调函数。这样不仅可以实现异步的操作,最大化利用MCU的计算资源,而且可以最小化定时器的中断时间。只不过每设置一个定时器事件,就需要为这个事件设定全局标志位,并且为其单独计数、检测标志位。如果处理不好,将会使全局标志散落在程序的各个角落,不仅使程序结构臃肿,而且会留下bug隐患。
基于以上原因,我明确了SmartTimer的开发目的,就是统一管理各个定时器事件,将定时计数、判断定时溢出,执行回调函数都封装起来。使用者在SmartTimer外部不必关心具体的内部实现,只需要用一行语句即可完成异步延迟的操作,不必进行额外的操作。除了简便外另一个好处是,即便定时器部分出现了程序上的bug,也使得问题更加集中,便于定位bug而进行修改。
在对外功能上,提供runlater,runloop,delay这三个功能。
SmartTimer的初步构想##
明确了开发目的,就开始构建SmartTImer了。我考虑的SmartTimer架构其实很简单,总体上分为三大块,如下图所示:
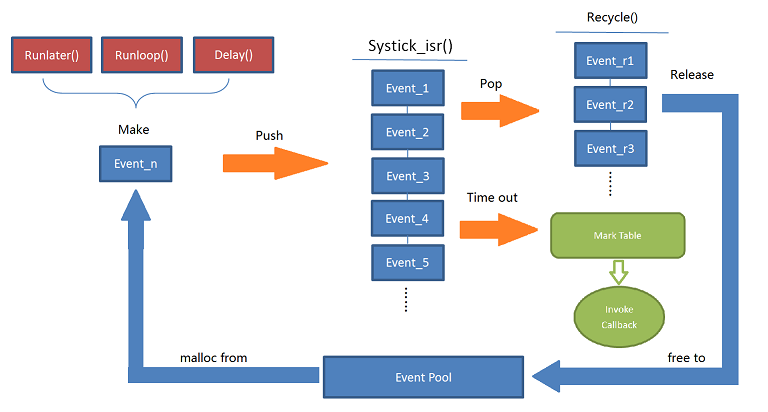
简要说明一下这个系统框图:
- 用户调用runlater、runloop、delay后,会从内存池中拿出一个event对象并初始化,push进event链表中;
- 定时器中断函数每隔Xms执行一次,遍历整个event链表,给每个event事件定时+1,并判断定时时间是否到达。如果到达则将该事件的溢出计数+1;如果定时循环次数不为0,则重新计数,否则将该事件对象从event链表中转移到recycle数组中。
- 在主while循环中,查询mark table,如某事件的溢出计数大于0则执行对应的回调函数,并将溢出计数-1;查询recycle数组,如果有需要回收的event事件,则释放资源到内存池中。
架构出来后,本着先完成再优化的原则,稍微考虑下优化方针,就可以动手实现了。由于SmartTimer没有抢占机制,所以属于非实时性工具。但理论上来说,如果以上描述的3大块程序都执行的非常快,那么就可以理解为接近“实时”了。所以为了提高实时性,需要提高程序的执行速度。在代码优化上,我主要采用了空间换时间的方法,牺牲了一部分内存来换取执行速度。主要用在event pool上,以及用数组映射来设置溢出标志和执行回调函数等地方。
SmartTimer的初步实现
首先抽象出定时器事件的定义:
struct stim_event{
uint16_t interval; //定时事件的定时间隔
uint16_t now; //定时事件的当前计数
uint16_t looptimes; //loop次数
uint8_t addIndex; //事件对象在内存池中的序号
uint8_t stat; //定时事件的当前状态
struct stim_event *next;
struct stim_event *prev;
};
从结构体定义上可以看出,我准备用双向链表来组织这些定时器事件。用链表而不是数组来构建事件list,是因为定时器事件的加入和移除是动态的,且有时会从list中间增减事件,所以用链表比数组更加合理。
在SmartTimer初始化时,会预先创建一个stim_event的数组作为event pool来使用。另外还会创建两个元素数量与event pool相同的数组,一个是MarkArray,用来存储event的溢出计数;一个是CallbackArray,用来存储回调函数的函数指针。event、溢出计数、回调函数用stim_event中的addIndex联系起来。
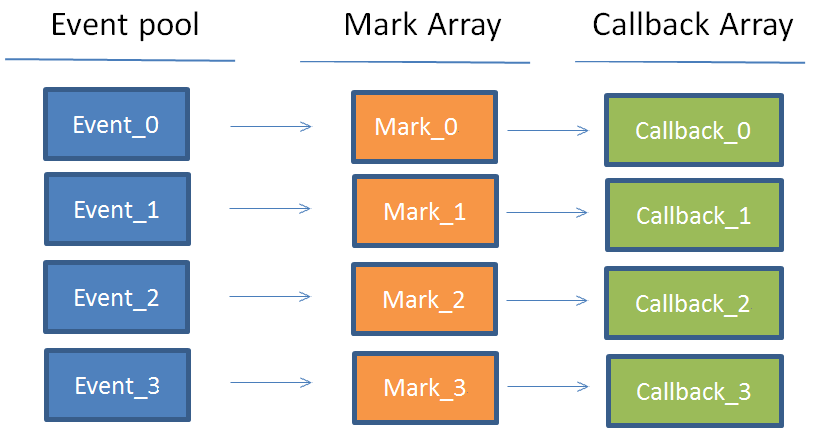
event->addIndex为该event在event pool数组中的序号(数组下标),相应的MarkArray和CallbackArray数组中,序号为event->addIndex的元素,存储着该event的溢出计数和回调函数指针。当某个event计时时间到,那么MarkList中第event->addIndex个元素溢出计数+1,将CallbackArray数组中第event->addIndex个元素存储的函数指针调用一次。
定时器中断函数,主要是遍历event链表,进行定时计数并判断是否定时溢出。
void stim_tick (void)
{
struct stim_event *tmp;
if (event_list.count == 0)
return;
tmp = event_list.head;
while(tmp != NULL){ //遍历event链表
if(tmp->stat != STIM_EVENT_ACTIVE){
tmp = tmp->next;
continue;
}
if(tmp->now == tmp->interval){
mark_list[tmp->addIndex] += 1; //时间到,溢出计数+1
if((tmp->looptimes != STIM_LOOP_FOREVER) &&
(--tmp->looptimes == 0)){ // 循环次数为0,移除事件链表
tmp->stat = STIM_EVENT_RECYCLE;
recycle_list[recycle_count] = tmp;
recycle_count++;
}
tmp->now = 0;
}
tmp->now++;
tmp = tmp->next;
}
}
在主while循环中,主要是执行callback函数,以及回收event事件对象
void stim_mainloop ( void )
{
uint8_t i;
struct stim_event *tmp;
for(i = 0; i < STIM_EVENT_MAX_SIZE; i++){ //检查溢出标志,并执行回调函数
if((mark_list[i] != STIM_INVALID) && (mark_list[i] > 0)){
if(callback_list[i] != NULL){
callback_list[i]();
}
mark_list[i] -= 1;
}
}
if(recycle_count > 0){
for(i = 0; i < STIM_EVENT_MAX_SIZE; i++){ //如果有需要回收的event,则回收对象
tmp = recycle_list[i];
if(tmp != NULL && mark_list[tmp->addIndex] == 0){
pop_event(tmp);
recycle_list[i] = NULL;
recycle_count--;
break;
}
}
}
}
以上是SmartTimer 1.0版本的核心代码。至此,SmartTimer已经可以运行起来了,它大致上完成了我的设计目的,但是并没有完成我的设计目标——它运行的效率并不高,这样以来,实时性就会大打折扣。但是SmartTimer的设计架构我认为还是合理的,只需在这个框架内对调度算法进一步优化,就可以更完善了。下一篇文章,我会介绍我的优化思路和实现方法,敬请期待!
SmartTimer的应用技巧##
在《SmartTImer——一个基于STM32的时钟管理器》中,我已经详细介绍过SmartTimer的一般使用方法,不再赘述,下面来简单谈谈高级用法。
我们先来看看传统的单片机程序架构:
void main (void)
{
system_init(); //系统初始化
peripheral_init();//外设初始化
while(1){
switch(step){ //主程序状态机
case A: // do something
break;
case B: //do something
break;
……
default: //do something
break;
}
usart_driver();//串口驱动
timer_event_handler();//定时器事件处理
……
}
}
一般来说都是先进行系统各项初始化,然后就进入了主while循环中,在while循环中,主要执行系统状态机,用来完成当发生xx事后,执行xx函数的功能。在状态机之外,有一些辅助性的功能,例如系统Led呼吸灯驱动、串口驱动、定时事件回调函数等等。
我们单看主while循环内的部分,做一个最简模型。如果假定switch状态机部分的执行需要100ms,串口驱动执行需要10ms,定时器事件处理执行需要20ms,那么while内的程序每循环一次使用130ms。我们其实可以换个角度来看这段程序,即switch状态机每隔30ms执行一次,串口驱动每隔120ms执行一次,而定时事件处理函数每隔110ms执行一次。

是不是很神奇?如果基于时间的角度来考虑问题,那么本来交织在一起的程序被轻易的模块化了,模块化的好处显而易见,不仅程序架构简单清晰,而且便于维护。利用SmartTimer的runloop功能可以轻松实现基于时间的模块化程序架构。我们来看看将上面的例子进行基于时间的模块化修改:
static void state_machine(void)
{
switch(step){ //主程序状态机
case A: // do something
break;
case B: //do something
break;
……
default: //do something
break;
}
}
void main (void)
{
system_init(); //系统初始化
peripheral_init();//外设初始化
stim_loop(30,state_machine,STIM_LOOP_FOREVER);
stim_loop(120,usart_driver,STIM_LOOP_FOREVER);
stim_loop(110,timer_event_handler,STIM_LOOP_FOREVER);
……
while(1){
stim_mainloop();
}
}
架构是不是瞬间变简洁了?另外,照这个思路考虑问题,状态机部分的程序也可以分解成若干个模块,使程序更加简洁、优雅。
