目录
1.4 运行turtlebot3_teleop_key节点 4
2.4.1 运行turtlebot3_manipulation_bringup节点 7

![]()
1.使用TurtleBot3机械手运行SLAM
带有开放MANIPULATOR-X的TurtleBot3的SLAM与我们前面学习的SLAM不同。
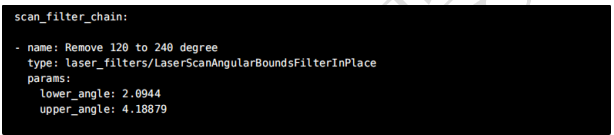
由于机器人手臂阻塞了LDS传感器的某些部分,我们只能通过限制SLAM中使用的LDS传感器的范围来平滑地映射。
通过过滤LDS的设置角度范围数据,您可以在不使用无效角度值的情况下进行映射传感器从下![]()
![]() 文件如图所示面。
文件如图所示面。
![]()

![]()
1.1 roscore运行
[远程PC]使用下面的命令运行roscore。
![]()
![]()
1.2 准备行动
[TurtleBot3 SBC]使用下面的命令运行激活rosserial和LDS传感器的节点。

![]()

![]()
使用SLAM创建地图时不使用操纵,因此不需要运行Open MANIPULATO R控制器和move_group界面如下所示。

![]()
1.3 运行SLAM节点
在这一部分中,我们使用Gmapping运行SLAM
![]()
![]()

![]()
1.4 运行turtlebot3_teleop_key节点
[远程PC]通过将机器人移动到地图的未知部分来完成地图。
![]()
![]()
[远程PC]地图完成后,运行map_saver节点保存地图文件。
![]()
![]()
<-f>选项指定地图文件保存位置和文件名。 上面的命令使用~/${map_name}选项,因此它将保存为 ![]()
![]() 在里面用户的家庭文件夹(~/或/家庭/<用户名>)。在${map_name}中输入文件名}。
在里面用户的家庭文件夹(~/或/家庭/<用户名>)。在${map_name}中输入文件名}。
2.导航
用Open MANIPULATOR导航Bot3与默认TurtleBot平台中的导航运行没有太大的不同。 然而,与SLAM一样,最好设置LDS传感器范围。 可以控制机器人手臂和夹持器的相关节点可以在导航过程中运行OpenManipulator。
2.1 roscore运行
[远程PC]运行roscore
![]()
![]()
2.2 准备行动
[TurtleBot3SBC]使用下面的命令运行激活rosserial和LDS传感器的节点。
![]()
![]()

![]()
2.3 运行导航
[远程PC]运行下面的命令加载要运行的各种参数和映射导航。 它还加载URDF和RViz配置来创建GUI环境。 许多节点将同时运行,因此首先检查文件和节点。

![]()

![]()

![]()
2.4 控制开放式制造商
如果在运行导航时创建一个控制OpenManipulator的节点,则可以使用导航控制机器人手臂。
如果在机器人运动过程中移动OpenManipulator,则重心的振动或移动会导致机器人手臂运动不稳定。 建议当机器人手臂不活动时移动它们。
2.4.1 运行turtlebot3_manipulation_bringup节点
[远程PC]运行arm_controller和gripper_controller,就像控制Open MANIPULATOR一样。

![]()
![]()
2.4.2 运行move_group节点
运行move_group节点后,可以使用Move It或ROBOTIS GUI来控制Open Manipulator。 本手册描述了运行ROBOTIS GUI的两种方法。 使用两种方法之间的适当接口。
![]()
![]()
![]()
2.4.3 运行ROBOTIS GUI控制器
[远程PC]ROBOTIS GUI支持任务空间控制,它指的是基于第一个夹持器的有效夹持位置(夹持器之间的红色六面体
开放式制造商和联合空间控制的DYNAMIXEL,指的是每个关节的角度。 任何一种方法都可以根据需要使用。
![]()
![]()
![]()