转载自:https://blog.csdn.net/hpuhjl/article/details/80899931
鱼眼矫正有很多的方法, 比较常用的有:
- 棋盘标定法
- 经纬度法
opencv自带鱼眼矫正算法, 也就是第一种, 棋盘矫正法。
第一步:制作棋盘格
用A4纸打印一张棋盘格, 固定到硬纸板上, 然后用鱼眼镜头对着拍摄。 保留拍到的图片, 如下图所示:
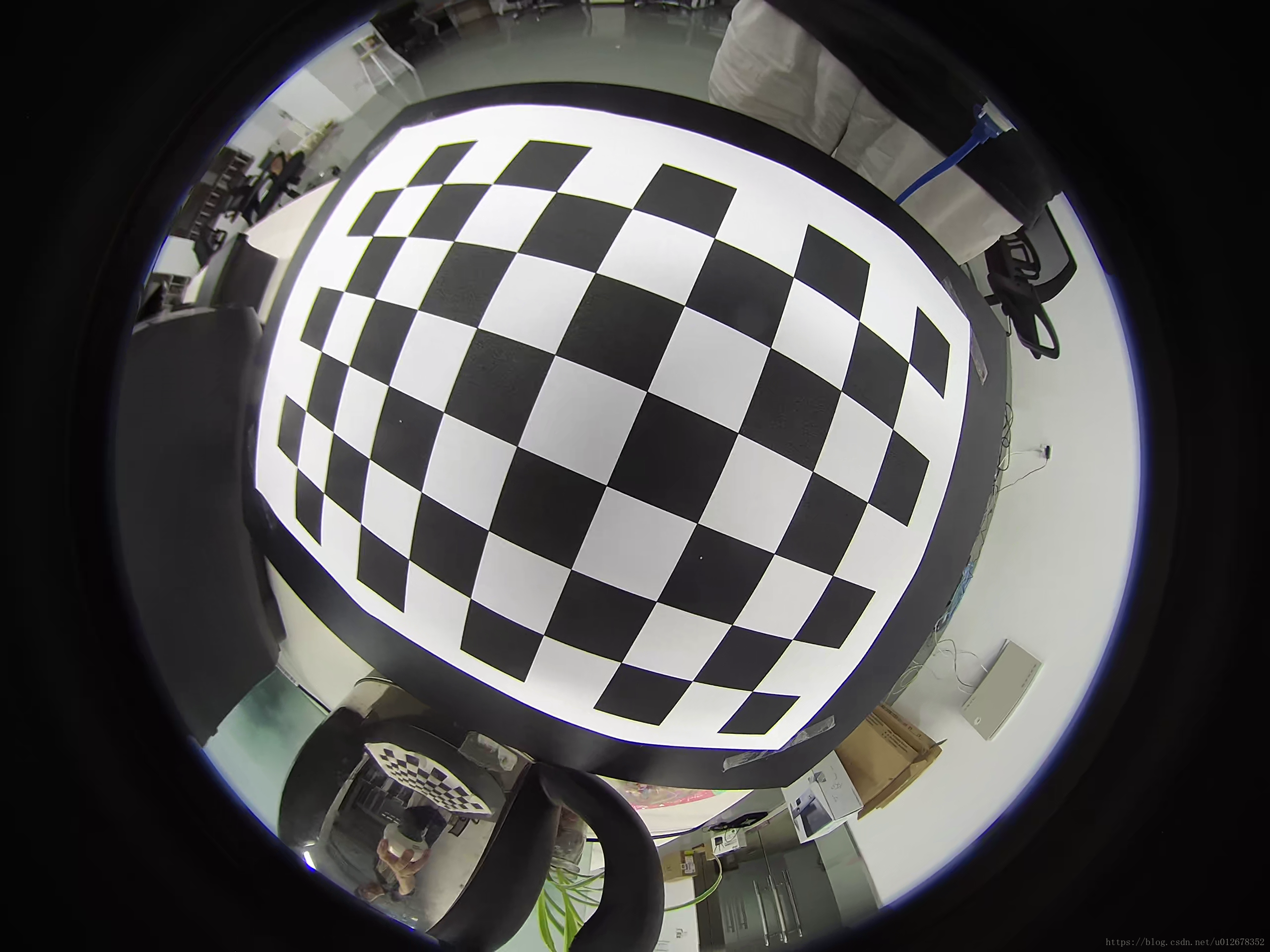
可以从不同角度拍摄, 多保存一些。
第二步: 计算内参和矫正系数
棋盘标定法, 必须要先计算出鱼眼的内参和矫正系数, 可直接调用以下函数计算
import cv2 assert cv2.__version__[0] == '3' import numpy as np import os import glob def get_K_and_D(checkerboard, imgsPath): CHECKERBOARD = checkerboard subpix_criteria = (cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 0.1) calibration_flags = cv2.fisheye.CALIB_RECOMPUTE_EXTRINSIC+cv2.fisheye.CALIB_CHECK_COND+cv2.fisheye.CALIB_FIX_SKEW objp = np.zeros((1, CHECKERBOARD[0]*CHECKERBOARD[1], 3), np.float32) objp[0,:,:2] = np.mgrid[0:CHECKERBOARD[0], 0:CHECKERBOARD[1]].T.reshape(-1, 2) _img_shape = None objpoints = [] imgpoints = [] images = glob.glob(imgsPath + '/*.png') for fname in images: img = cv2.imread(fname) if _img_shape == None: _img_shape = img.shape[:2] else: assert _img_shape == img.shape[:2], "All images must share the same size." gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY) ret, corners = cv2.findChessboardCorners(gray, CHECKERBOARD,cv2.CALIB_CB_ADAPTIVE_THRESH+cv2.CALIB_CB_FAST_CHECK+cv2.CALIB_CB_NORMALIZE_IMAGE) if ret == True: objpoints.append(objp) cv2.cornerSubPix(gray,corners,(3,3),(-1,-1),subpix_criteria) imgpoints.append(corners) N_OK = len(objpoints) K = np.zeros((3, 3)) D = np.zeros((4, 1)) rvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)] tvecs = [np.zeros((1, 1, 3), dtype=np.float64) for i in range(N_OK)] rms, _, _, _, _ = cv2.fisheye.calibrate( objpoints, imgpoints, gray.shape[::-1], K, D, rvecs, tvecs, calibration_flags, (cv2.TERM_CRITERIA_EPS+cv2.TERM_CRITERIA_MAX_ITER, 30, 1e-6) ) DIM = _img_shape[::-1] print("Found " + str(N_OK) + " valid images for calibration") print("DIM=" + str(_img_shape[::-1])) print("K=np.array(" + str(K.tolist()) + ")") print("D=np.array(" + str(D.tolist()) + ")") return DIM, K, D # 计算内参和矫正系数 ''' # checkerboard: 棋盘格的格点数目 # imgsPath: 存放鱼眼图片的路径 ''' get_K_and_D((6,9), 'fisheyeImage')
第三步: 根据计算的K和D, 矫正鱼眼图
保存第二步计算的DIM, K, D, 利用一下程序, 矫正鱼眼图。
def undistort(img_path): img = cv2.imread(img_path) img = cv2.resize(img, DIM) map1, map2 = cv2.fisheye.initUndistortRectifyMap(K, D, np.eye(3), K, DIM,cv2.CV_16SC2) undistorted_img = cv2.remap(img, map1, map2, interpolation=cv2.INTER_LINEAR,borderMode=cv2.BORDER_CONSTANT) cv2.imwrite('unfisheyeImage.png', undistorted_img)
DIM, K, D是固定不变的,因此,map1和map2也是不变的, 当你有大量的数据需要矫正时, 应当避免map1和map2的重复计算, 只需要计算remap即可。
矫正效果
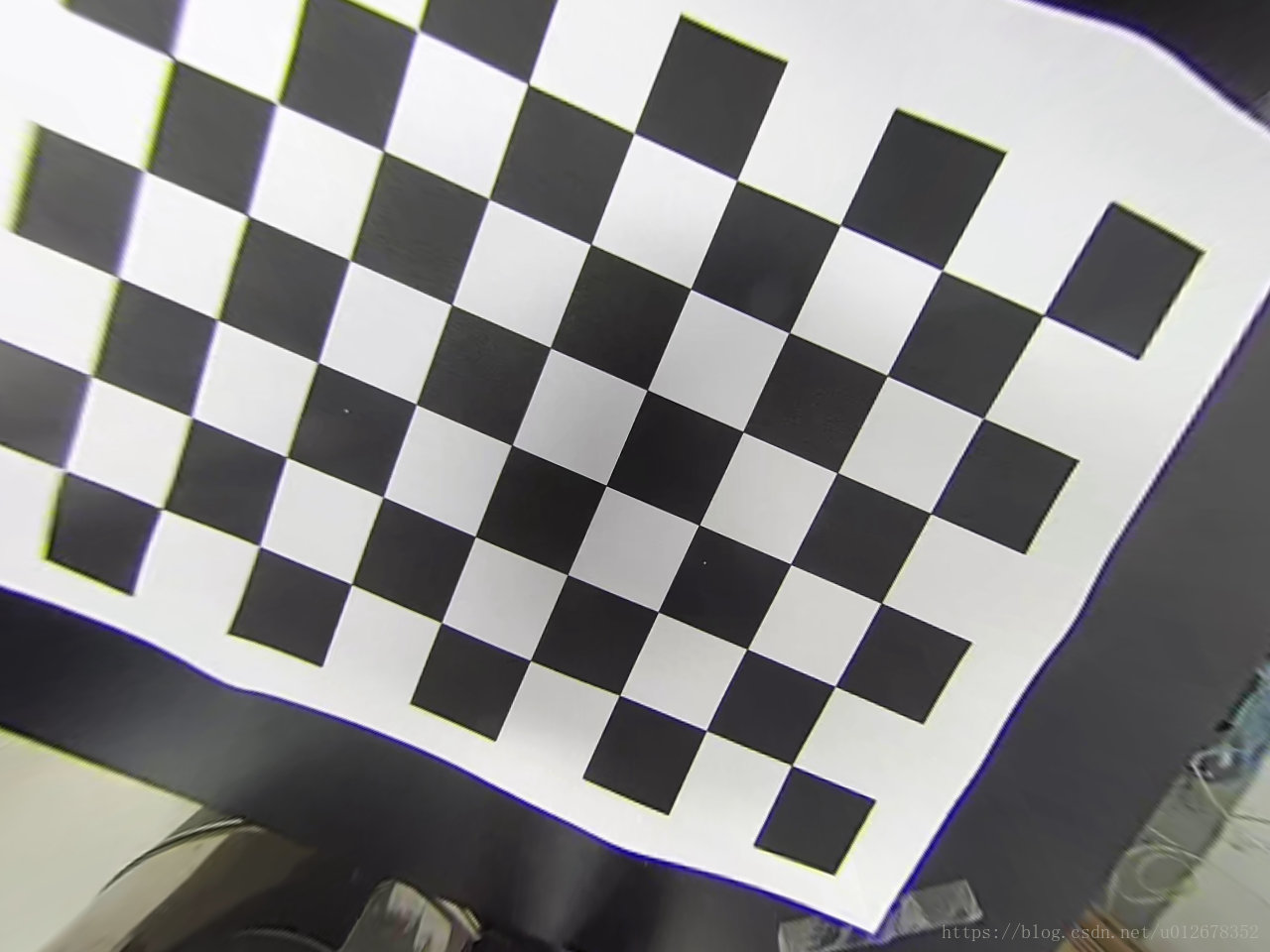
后续
矫正结束, 对于上面的矫正结果, 应该适用于很多场景了, 但是矫正之后, 很多有效区域被截掉了, 能否矫正出更大的有效面积呢? 答案当然是有的, 具体的细节, 去我的github上看项目里面的pdf吧, 这里不再介绍了。
github: https://github.com/HLearning/fisheye
def undistort(img_path,K,D,DIM,scale=0.5,imshow=False): img = cv2.imread(img_path) dim1 = img.shape[:2][::-1] #dim1 is the dimension of input image to un-distort assert dim1[0]/dim1[1] == DIM[0]/DIM[1], "Image to undistort needs to have same aspect ratio as the ones used in calibration" if dim1[0]!=DIM[0]: img = cv2.resize(img,DIM,interpolation=cv2.INTER_AREA) Knew = K.copy() if scale:#change fov Knew[(0,1), (0,1)] = scale * Knew[(0,1), (0,1)] map1, map2 = cv2.fisheye.initUndistortRectifyMap(K, D, np.eye(3), Knew, DIM, cv2.CV_16SC2) undistorted_img = cv2.remap(img, map1, map2, interpolation=cv2.INTER_LINEAR, borderMode=cv2.BORDER_CONSTANT) if imshow: cv2.imshow("undistorted", undistorted_img) return undistorted_img