1、前向星
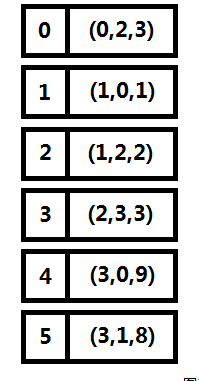
前向星是以存储边的方式来存储图,先将边读入并存储在连续的数组中,然后按照边的起点进行排序,这样数组中起点相等的边就能够在数组中进行连续访问了。它的优点是实现简单,容易理解,缺点是需要在所有边都读入完毕的情况下对所有边进行一次排序,带来了时间开销,实用性也较差,只适合离线算法。图一-2-4展示了图一-2-1的前向星表示法。
2、链式前向星(就是数组模拟链表)
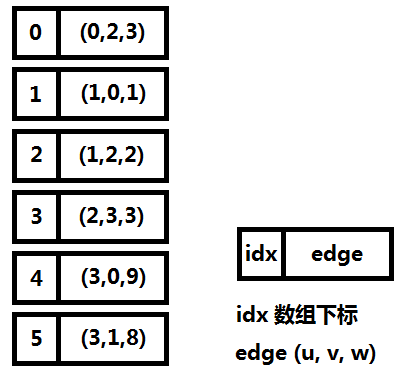
链式前向星和邻接表类似,也是链式结构和线性结构的结合,每个结点i都有一个链表,链表的所有数据是从i出发的所有边的集合(对比邻接表存的是顶点集合),边的表示为一个四元组(u, v, w, next),其中(u, v)代表该条边的有向顶点对,w代表边上的权值,next指向下一条边。
具体的,我们需要一个边的结构体数组 edge[MAXM],MAXM表示边的总数,所有边都存储在这个结构体数组中,并且用head[i]来指向 i 结点的第一条边。
边的结构体声明如下:
struct EDGE {
int u, v, w, next;
EDGE() {}
EDGE(int _u, int _v, int _w, int _next) {
u = _u, v = _v, w = _w, next = _next;
}
}edge[MAXM];
int u, v, w, next;
EDGE() {}
EDGE(int _u, int _v, int _w, int _next) {
u = _u, v = _v, w = _w, next = _next;
}
}edge[MAXM];
初始化所有的head[i] = INF,当前边总数 edgeCount = 0
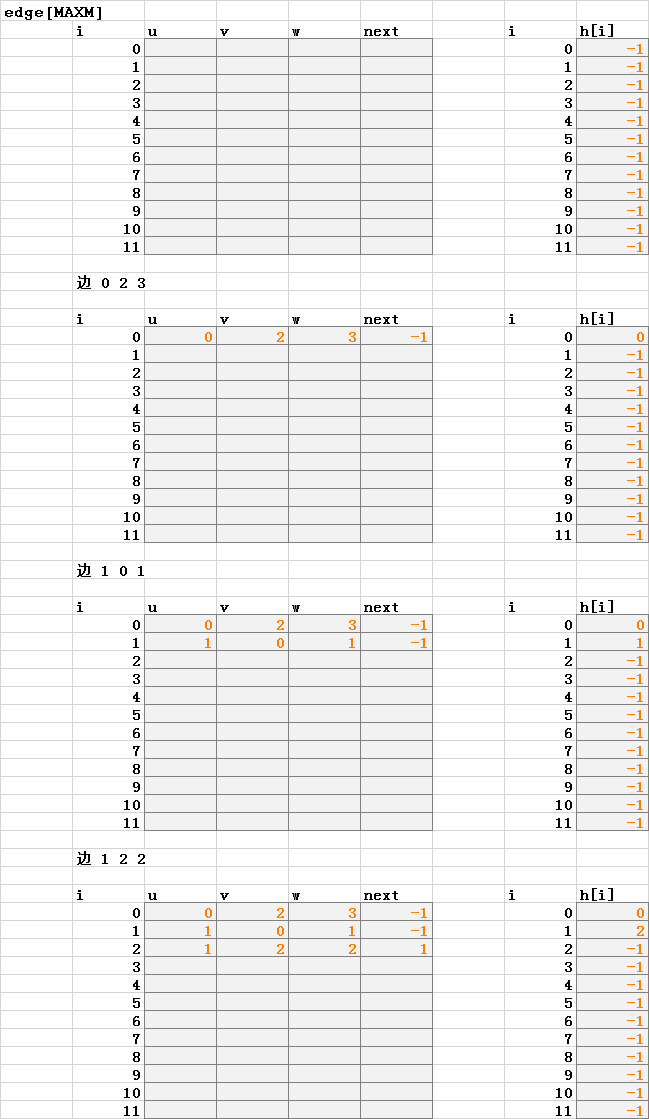
每读入一条边,调用addEdge(u, v, w),具体函数的实现如下:
void addEdge(int u, int v, int w) {
edge[ edgeCount ] = EDGE(u, v, w, head[u]);
head[u] = edgeCount ++;
}
edge[ edgeCount ] = EDGE(u, v, w, head[u]);
head[u] = edgeCount ++;
}
这个函数的含义是每加入一条边(u, v),就在原有的链表结构的首部插入这条边,使得每次插入的时间复杂度为O(1),所以链表的边的顺序和读入顺序正好是逆序的。这种结构在无论是稠密的还是稀疏的图上都有非常好的表现,空间上没有浪费,时间上也是最小开销。
调用的时候只要通过head[i]就能访问到由 i 出发的第一条边的编号,通过编号到edge数组进行索引可以得到边的具体信息,然后根据这条边的next域可以得到第二条边的编号,以此类推,直到next域为INF(这里的INF即head数组初始化的那个值,一般取-1即可)。