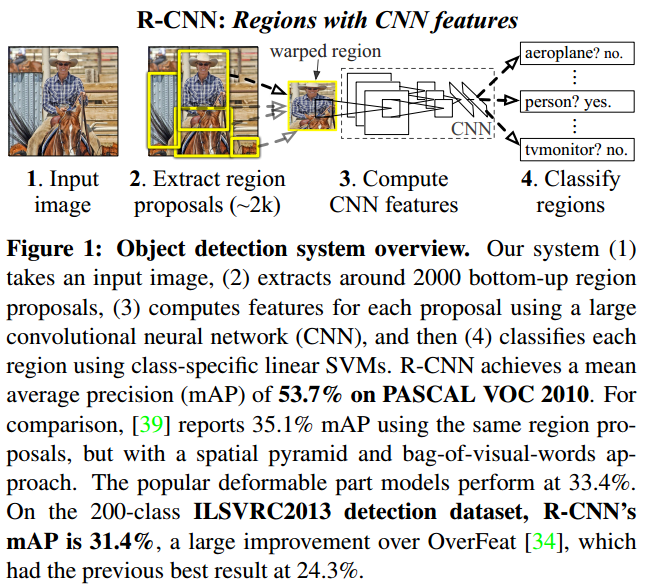
一、Rich feature hierarchies for accurate object detection and semantic segmentation
引用量:11000+
具体流程有如下三步:
A.利用selective search方法选取大约2000个左右的region proposal(图像上框出来的长方形框)。
B.对每个proposal通过CNN得到feature。
C.然后用SVM对feature分类,得到每个proposal的类别。
整体框架
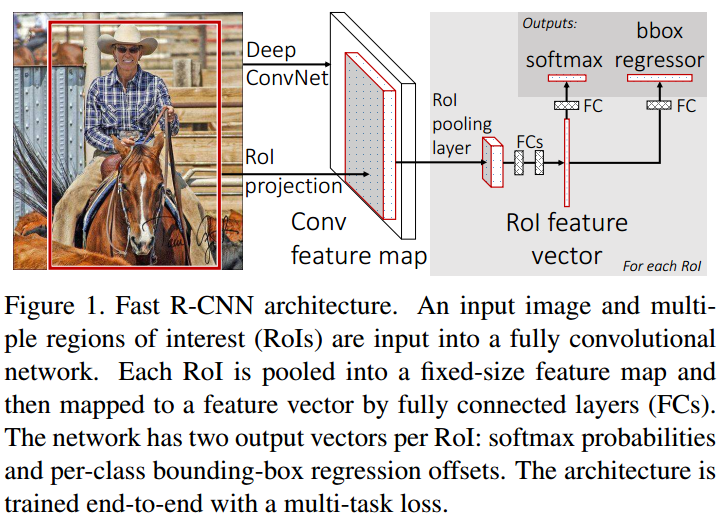
二、Fast R-CNN
论文地址:http://openaccess.thecvf.com/content_iccv_2015/papers/Girshick_Fast_R-CNN_ICCV_2015_paper.pdf
引用量:8000+
R-CNN因为每个region都需要通过CNN处理得到feature,故而有很多重复计算,严重影响了速度。
具体处理步骤:
A.先用CNN处理图像得到整个图像对应的feature,先将一张图像送入网络,而后将候选区域映射到图像feature,得到region of interest,这些候选区域的前几层特征不需要再重复计算。
B.将选出来的region映射到feature,得到每个region对应的feature,称之为region_feature。
C.利用ROI pooling对每一个region_feature统一为固定大小的feature,称之为fixed_feature。
D.通过全连接层处理每一个fixed_feature,在进行分类和回归。
整体框架:
ROI pooling layer:可参考 https://www.cnblogs.com/AntonioSu/p/11945892.html
三、Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks
引用量:15000+
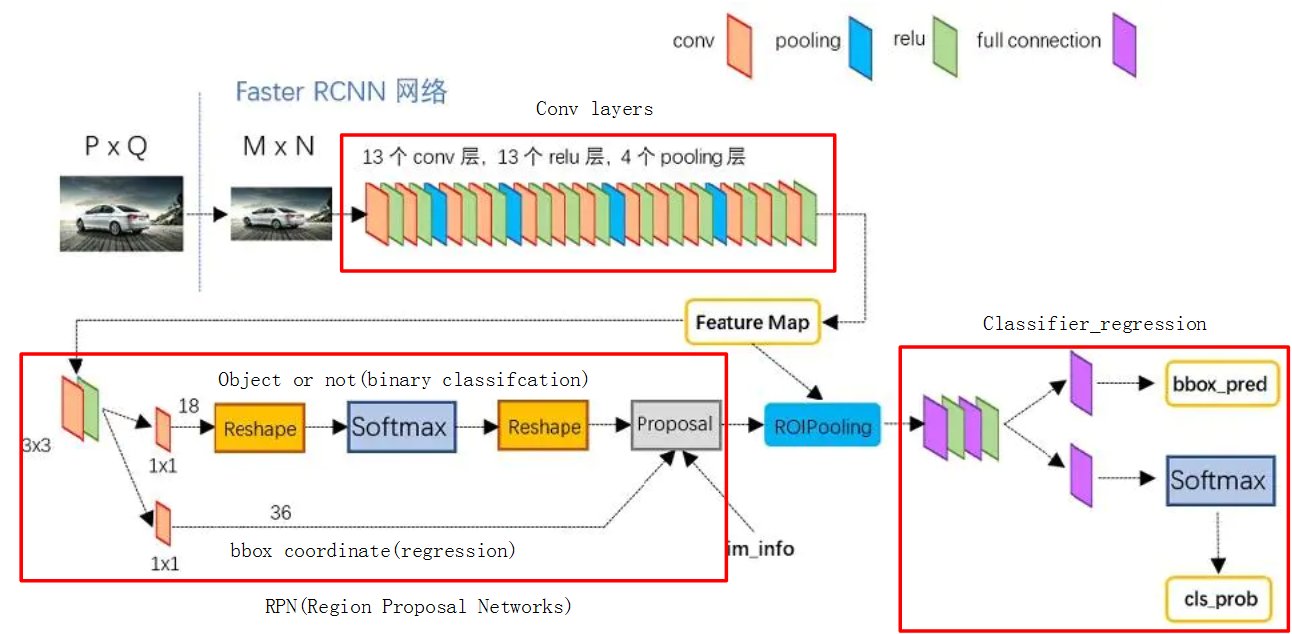
1.网络整体框架
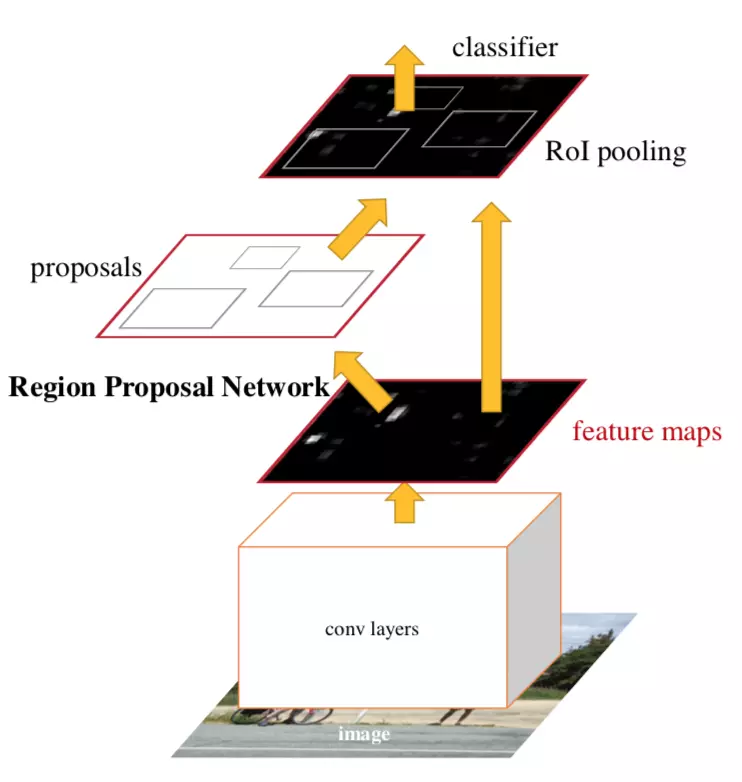
对上图先做一个简单的介绍
conv layers:用于提取图像的特征。输入是图片,输出是feature maps。
RPN网络:用于产生proposal。其中一支是判断前景or背景,一支是对位置坐标的初步回归。输入是feature maps,输出是proposal的位置偏移和类别(前景or背景)。
ROI pooling:统一大小不同的feature。将RPN的得到的proposal映射的feature maps,得到每个proposal的feature,而后对每个大小不同的proposal feature统一为大小相同的feature。
classifier:产生真正的类别和坐标。经过全连接层处理ROI pooling产生的feature,而后回归proposal在图像中的精确位置,输出proposal对应的类别。
1) conv layers
输入图片是MxN,经过conv layers,下采样16次,得到WxHx512(W=M/16,H=N/16)大小的feature maps。
2) RPN网络
输入:是conv layers产生的feature maps。对应feature maps的维度是WxHx512。
目的:生成proposal。操作方式是通过引入anchor,而后过滤得到proposal。
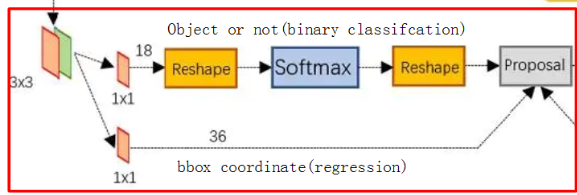
分类网络(object or not):是将WxHx512通过1x1的卷积核转化为WxHx18=WxHx9x2(其中9表示每个特征点取9种形状的方框,2表示前景和背景)。
回归网络(bbox coordinate):是将WxHx512通过1x1的卷积核转化为WxHx36=WxHx9x4(9同上,4是对应的4个坐标偏移值△x, △y, △w, △h)。
其中RPN网络会舍弃超出边界的anchor,利用nms过滤anchor,去除背景anchor,最后生成大概300左右的anchor,称之为proposal。
A.proposal
layer { name: 'proposal' type: 'Python' bottom: 'rpn_cls_prob_reshape' #[1,18,40,60]==> [batch_size, channel,height,width]Caffe的数据格式,anchor box分类的概率 bottom: 'rpn_bbox_pred' # 记录训练好的四个回归值x,y,w,h bottom: 'im_info' top: 'rpn_rois' python_param { module: 'rpn.proposal_layer' layer: 'ProposalLayer' param_str: "'feat_stride': 16 'scales': !!python/tuple [4, 8, 16, 32]" } }
其中rpn_bbox_pred 是WxHx9个anchor box加上对应的偏移值△x, △y, △w, △h,得到更加准确的bounding box。
其中rpn_cls_prob_reshape是由回归网络(bbox coordinate)得到的前景or背景的概率。
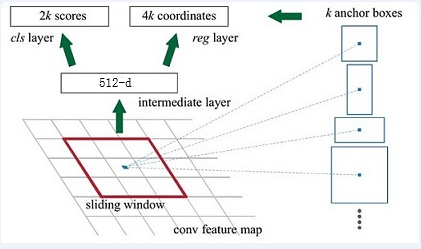
B.Anchor box
在特征图(feature maps)上的每一个点取9个候选区域(3个不同尺度,3个不同长宽比),称之为anchor box,亦称为ROI(region of interest)。
3)ROI pooling
其中 feature maps的维度是WxHx512。
RPN的得到的300个proposal,每个proposal的大小各不相同。
将proposal映射到feature maps,得到proposal的feature,proposal_feature的维度为300*512*x*y,其中每个proposal的x和y都不相同。
最后通过ROI pooling将300*512*x*y转化为统一的维度:300*512*7*7。
具体ROIPooling详细过程参见:https://www.cnblogs.com/AntonioSu/p/11945892.html
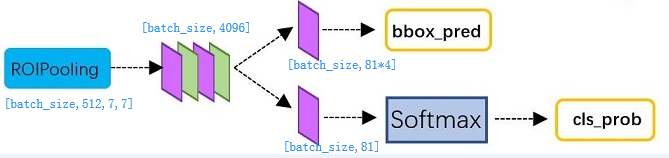
4)Classifer_regression
对ROI pooling产生的tensor(300*512*7*7),其中300是proposal的个数,相当于batch_size=300,经过全连接层,分两支得到bbox_pred=[batch_size,81*4]和cls_prob=[batch_size,81]。
bbox_pred表示对应的bbox的坐标,cls_prob表示对应的类别。
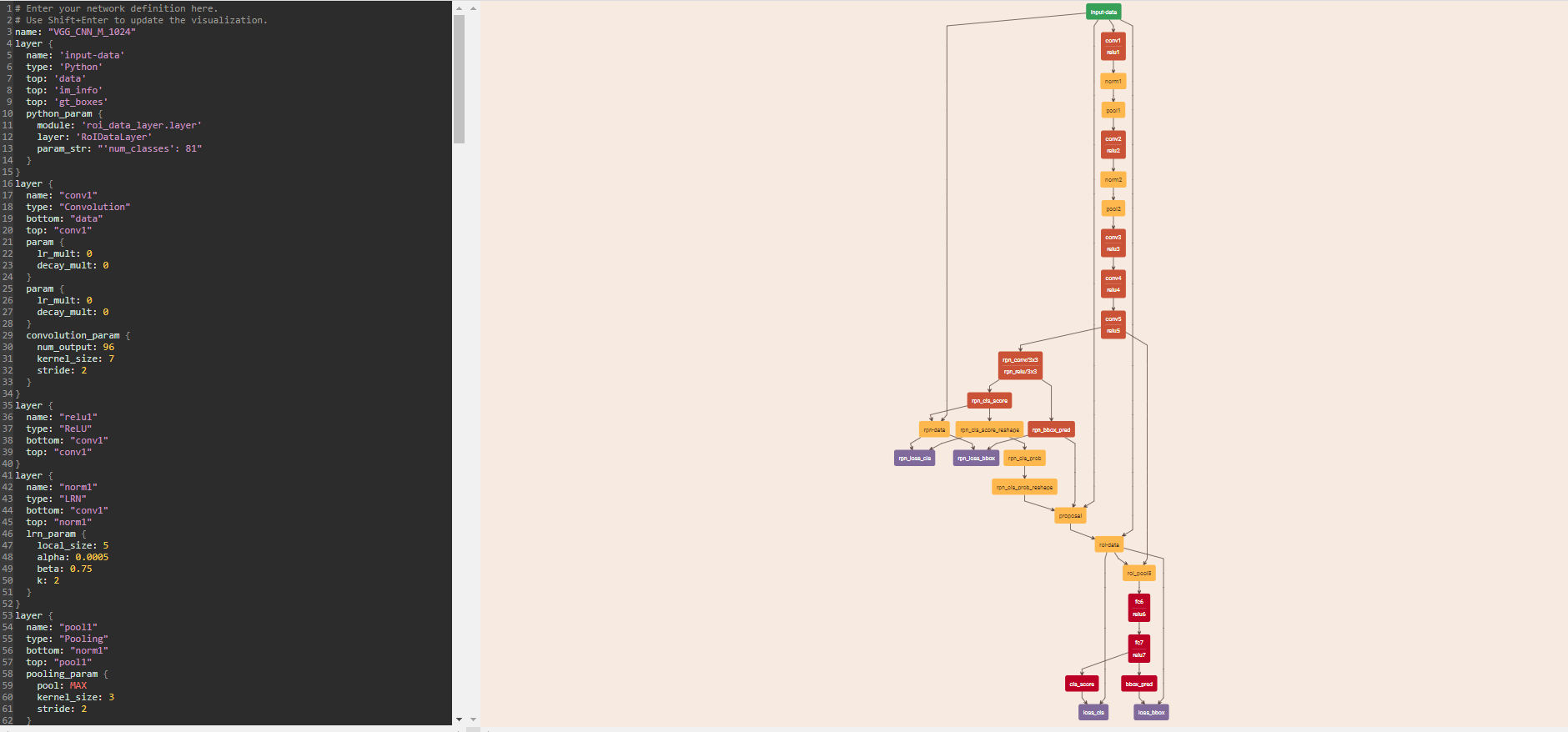
3.数据流图
利用对.prototxt可视化工具http://ethereon.github.io/netscope/#/editor。
具体步骤:将https://github.com/rbgirshick/py-faster-rcnn/blob/master/models/coco/VGG_CNN_M_1024/faster_rcnn_end2end/train.prototxt文件输入到http://ethereon.github.io/netscope/#/editor,而后shift+enter,可以查看具体的数据流。
展示结果如下: