1.令PI控制器中的系数K为零,设置最大电压为400V
设置P为80时,稳态误差小于4rad/s,数据如图所示


2.如图,当k=200,P=80.系统几乎无净差

3.
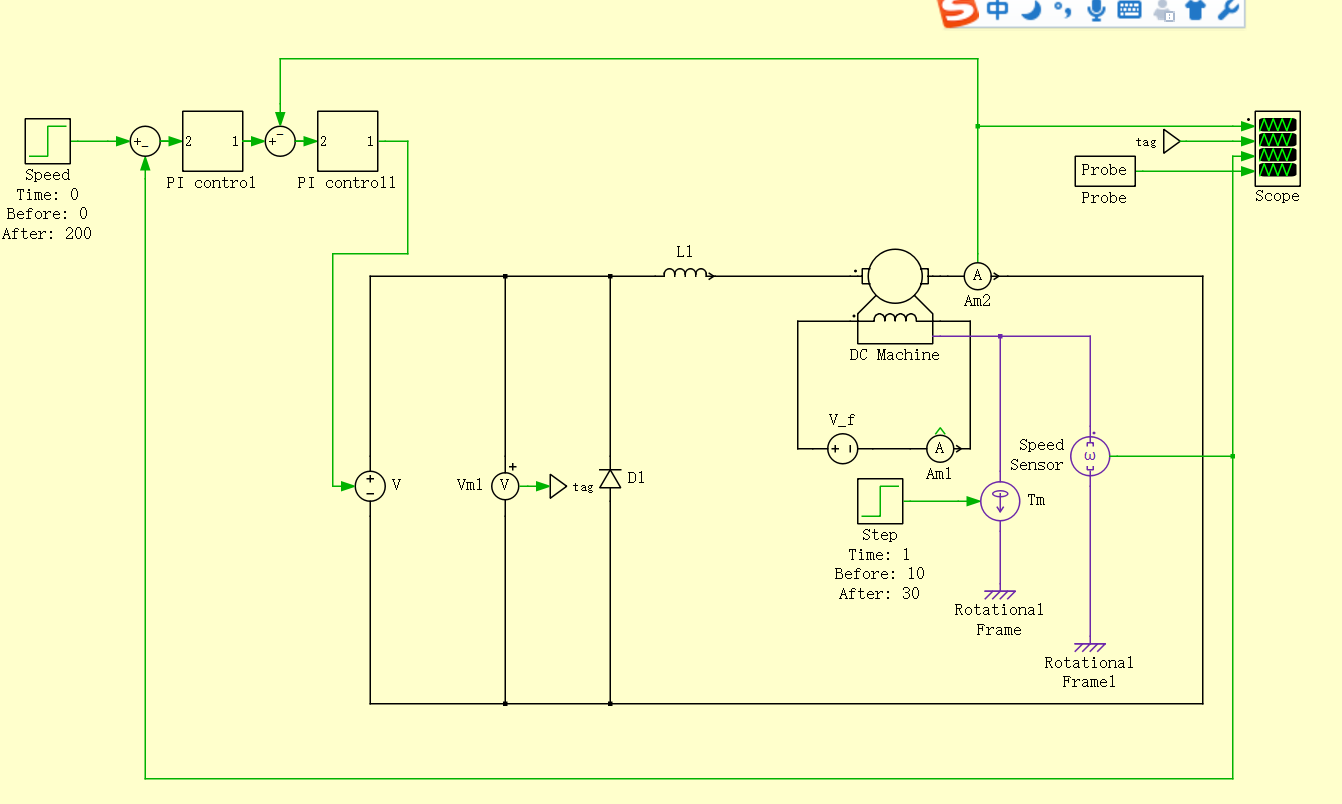
如图,为了使两级调节适当,取第一级和第二级调节的P值均为10,P值为9,则调节曲线如图所示:
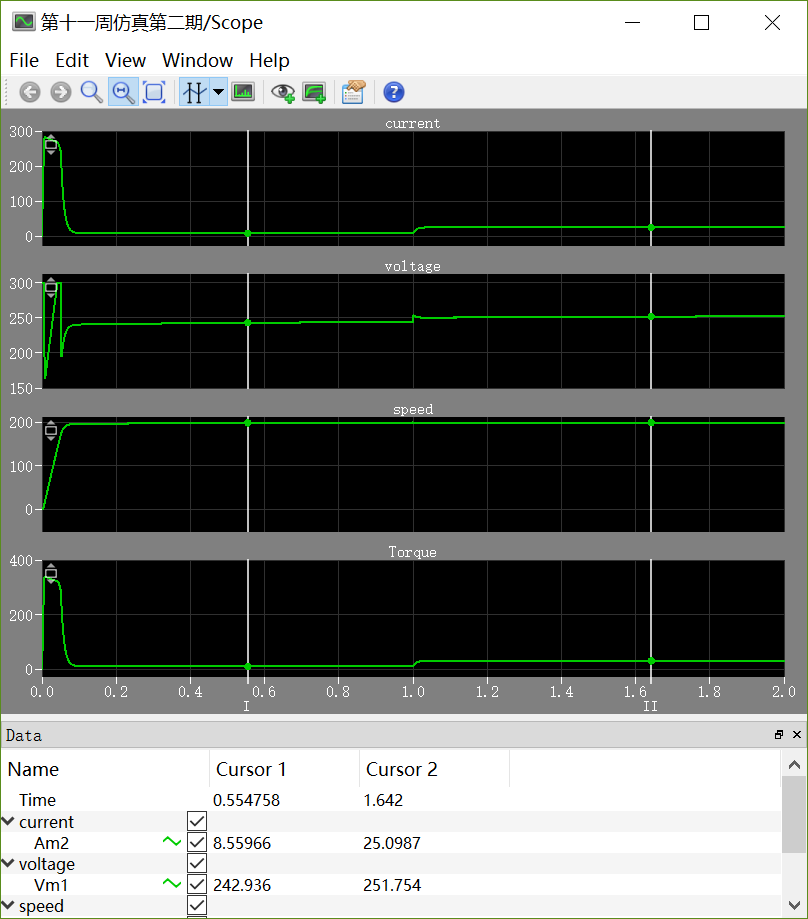
速度反应曲线良好。
一点理解:一开始设计双闭环时,对整个反馈理解不深。受第一问的思维惯性影响,认为第一个PI输出的为电压值,第二个PI的输入值为电流,所以需要把电流值乘以一个系数。在这个“系数”上费了很多时间。实际上,本问仿真中,相当于第一个PI控制器会用积分环节得出一个合适的电流值输出到第二个PI控制器,第个PI控制器会根据积分环节得到一个合适的电压值输出到可控电源,这样的话电路就十分简单了。