1. 多段图的最短路径问题
什么是多段图?
- 多段图是一个有向、无环、带权 图。
- 有且仅有一个起始结点(原点source) 和 一个终止结点(汇点target)。
- 它有n个阶段,每个阶段由特定的几个结点构成。
- 每个结点的所有结点都只能指向下一个相邻的阶段,阶段之间不能越界。
对其使用动态规划法:
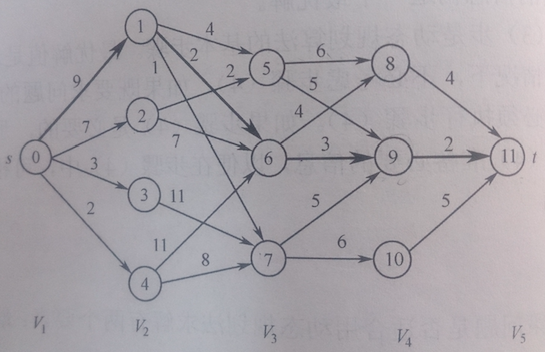
阶段:将图中的顶点划分5个阶段,k
状态:每个阶段有几种供选择的点s
决策:当前状态应在前一个状态的基础上获得。决策需要满足规划方程
规划方程:f(k)表示状态k到终点状态的最短距离。
初始条件:f(k)=0;
方程:f(k-1)=min{f(k)+W(k-1,k)}其中W(k-1,k)表示状态k-1到状态k的距离【向前处理】