参考:https://www.cnblogs.com/wenlong/p/5255671.html
1、作用
当类的模型有两个或多个维度的时候,如果两个变化维度用同一个类使用继承方式实现会变得很复杂(冗余代码很多),不易于维护和扩展(继承关系是一种强耦合关系),为了降低耦合关系,提高维护性和可扩展性,可以将两个变化维度的通过两个类(abstruction、implementor类)来实现,将两个类的关系为弱耦合的关联关系,这样就可以提高程序的扩展性和可维护性。
拿汽车在路上行驶的来说。既有小汽车又有公共汽车,它们都不但能在市区中的公路上行驶,也能在高速公路上行驶。这你会发现,对于交通工具(汽车)有不同的类型,它们所行驶的环境(路)也有不同类型,在软件系统中就要适应两个方面(不同车型,不同道路)的变化,怎样实现才能应对这种变化呢?
如果使用继承关系来实现,对应的UML图为如下:
这个模型中有路和汽车两个变化维度,第一次继承是扩展路的维度、第二次继承是扩展汽车的维度,两个维度是一个cross的关系,加入有10种路,10种汽车就会要继承出10*10+10个类,数量是指数增长的,也就是说扩展性很差,并且扩展出来的代码会有很多冗余的代码。
Road.h
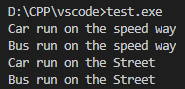
#include <iostream> #ifndef __ROAD__H__ #define __ROAD__H__ using namespace std; class Road { public: virtual void run() = 0; }; class SpeedWay: public Road { public: void run() override { cout<<"run on the speed way"<<endl; } }; class Street: public Road { public: void run() override { cout<<"run on the street"<<endl; } }; class CarOnSpeedWay: public SpeedWay { public: void run() override { cout<<"Car run on the speed way"<<endl; } }; class BusOnSpeedWay: public SpeedWay { public: void run() override { cout<<"Bus run on the speed way"<<endl; } }; class CarOnStreet: public Street { public: void run() override { cout<<"Car run on the Street"<<endl; } }; class BusOnStreet: public Street { public: void run() override { cout<<"Bus run on the Street"<<endl; } }; #endif
test.cc
#include "Road.h" int main() { Road *carOnSpeedway = new CarOnSpeedWay; Road *busOnSpeedway = new BusOnSpeedWay; Road *carOnStreet = new CarOnStreet; Road *busOnStreet = new BusOnStreet; carOnSpeedway->run(); busOnSpeedway->run(); carOnStreet->run(); busOnStreet->run(); return 0; }
输出:
缺点:
但是我们说这样的设计是脆弱的,仔细分析就可以发现,它还是存在很多问题,首先它在遵循开放-封闭原则的同时,违背了类的单一职责原则,即一个类只有一个引起它变化的原因,而这里引起变化的原因却有两个,即路类型的变化和汽车类型的变化;其次是重复代码会很多,不同的汽车在不同的路上行驶也会有一部分的代码是相同的;
再次是类的结构过于复杂,继承关系太多,难于维护,最后最致命的一点是扩展性太差。如果变化沿着汽车的类型和不同的道路两个方向变化,我们会看到这个类的结构会迅速的变庞大。
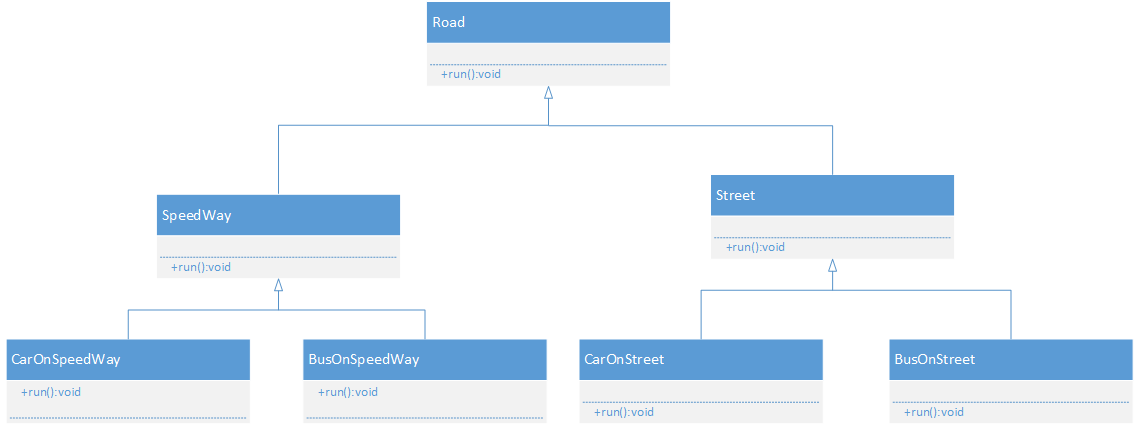
如果要增加一种路和车型,比如StateRoad和Moto,得到的UML图就是复杂很多。

增加了2种类型,却增加了6个类,且类型越多时,往后扩展,增加的类越多。主要原因是两个变化维度进行了cross,如果把两个维度进行独立开来,分开扩展就能实现某一个维度增加一种类型,只增加一个类,cross的操作,由用户来把握,这就要使用桥接模式。
2、实现方式
将两个变化维度分为两个基类(abstraction,implementor类中来实现),则两个类的关系为关联关系,而不是继承关系。如何将两个类关联在一起由用户的需求来选择。
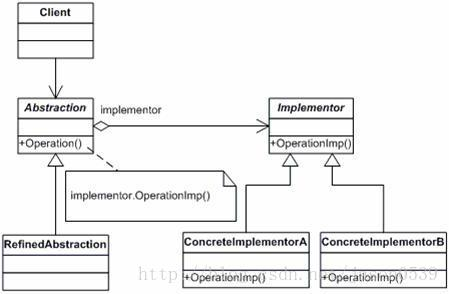
同样是上面的车在路上的模型,将路定义为Abstraction类,车定位为Implementor类(也可以反过来)。对应的UML模型如下:
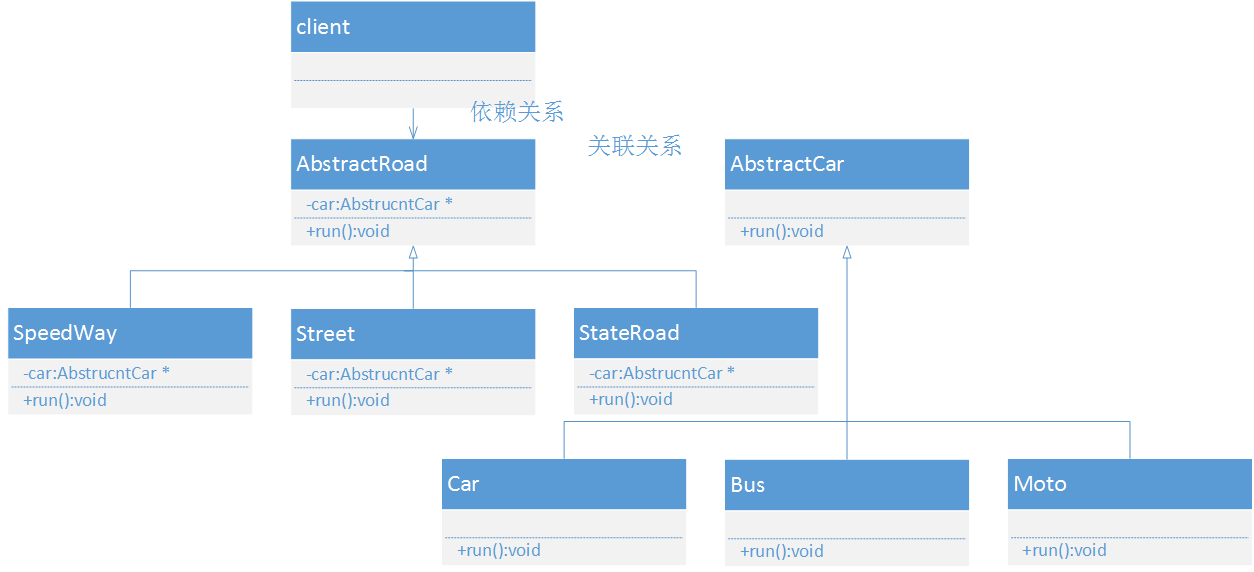
这个结构很清晰,方便后续的扩展和维护,如果要添加一种新的类型,只需要添加一个类即可完成。
3、C++代码
Road.h
#include <iostream> #ifndef __CAR__H__ #define __CAR__H__ using namespace std; class AbstractCar { public: virtual void run () = 0; }; class Car:public AbstractCar { public: void run () override { cout<<"Car"; } }; class Bus:public AbstractCar { public: void run () override { cout<<"Bus"; } }; class Moto:public AbstractCar { public: void run () override { cout<<"Moto"; } }; #endif
Car.h
#include <iostream> #include "Car.h" #ifndef __ROAD__H__ #define __ROAD__H__ using namespace std; class AbstractRoad { public: AbstractRoad(AbstractCar *car):car(car){} virtual void run() = 0; protected: AbstractCar *car; // 为了使用多态性,必须使用指针或者引用。 }; class SpeedWay: public AbstractRoad { public: SpeedWay(AbstractCar *car):AbstractRoad(car){} // 子类的构造函数调用父类的构造函数来初始父类的成员 void run() { car->run(); cout<<" run on the speed way"<<endl; } }; class Street: public AbstractRoad { public: Street(AbstractCar *car):AbstractRoad(car){} void run() { car->run(); cout<<" run on the street"<<endl; } }; class StateRoad: public AbstractRoad { public: StateRoad(AbstractCar *car):AbstractRoad(car){} void run() { car->run(); cout<<" run on the state road"<<endl; } }; #endif
test.cc
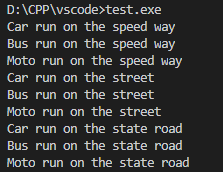
#include "Car.h" #include "Road.h" int main() { // 用户选择两个变化维度的组合。 AbstractRoad *carOnSpeedway = new SpeedWay(new Car); AbstractRoad *busOnSpeedway = new SpeedWay(new Bus); AbstractRoad *motoOnSpeedway = new SpeedWay(new Moto); AbstractRoad *carOnStreet = new Street(new Car); AbstractRoad *busOnStreet = new Street(new Bus); AbstractRoad *motoOnStreet = new Street(new Moto); AbstractRoad *carOnStateRoad = new StateRoad(new Car); AbstractRoad *busOnStateRoad = new StateRoad(new Bus); AbstractRoad *motoOnStateRoad = new StateRoad(new Moto); carOnSpeedway ->run(); busOnSpeedway ->run(); motoOnSpeedway ->run(); carOnStreet ->run(); busOnStreet ->run(); motoOnStreet ->run(); carOnStateRoad ->run(); busOnStateRoad ->run(); motoOnStateRoad ->run(); return 0; }
输出: