SMAP: Single-Shot Multi-Person Absolute 3D Pose Estimation
一. 论文简介
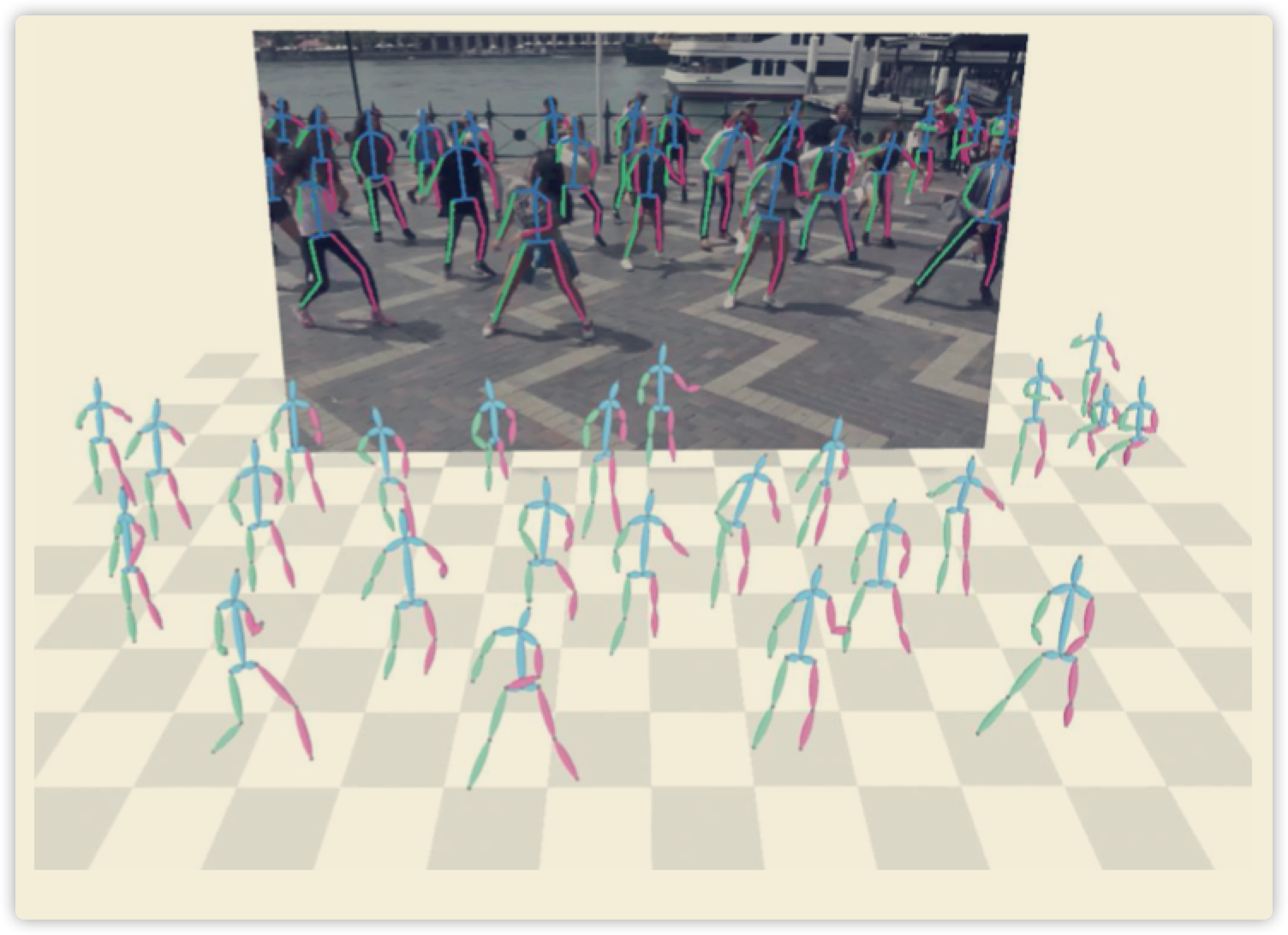
采用bottom-top的方式进行3D人体姿态检测,出的结果包括:3D root-relate + Absolute-depth + PAFs。
主要做的贡献如下(可能之前有人已提出):
- 3D bottom-top
- Root map + PAFs
二. 模块详解
2.1 整体结构介绍
论文思想比较简单,整体进行概括
- 2D heatmap采用正常方式
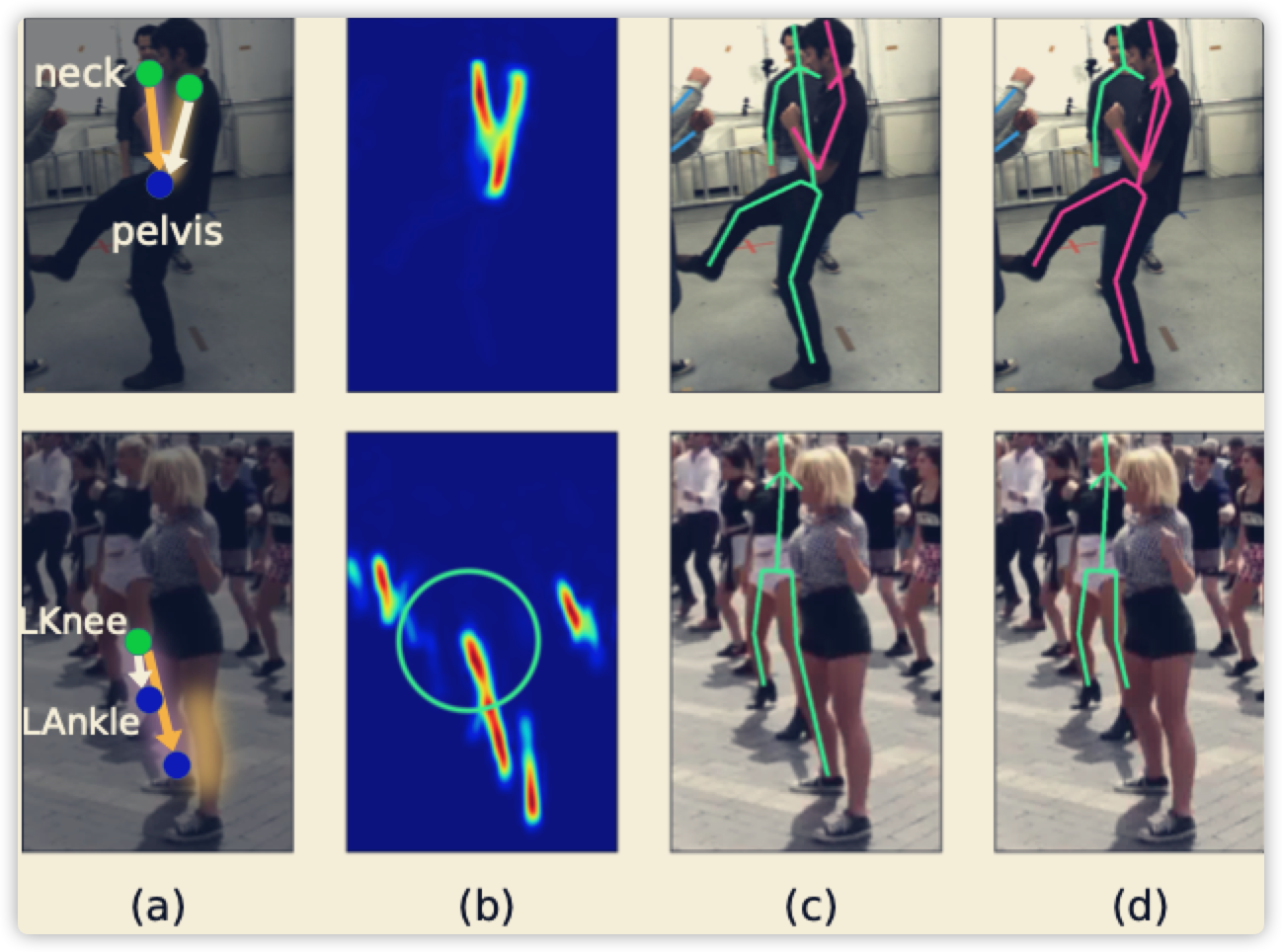
gaussian进行 - 相对深度采用在XY二维位置存储Z轴信息(这是老方法)
- PAFs通用方向连接模块
- 绝对深度使用人的中心点
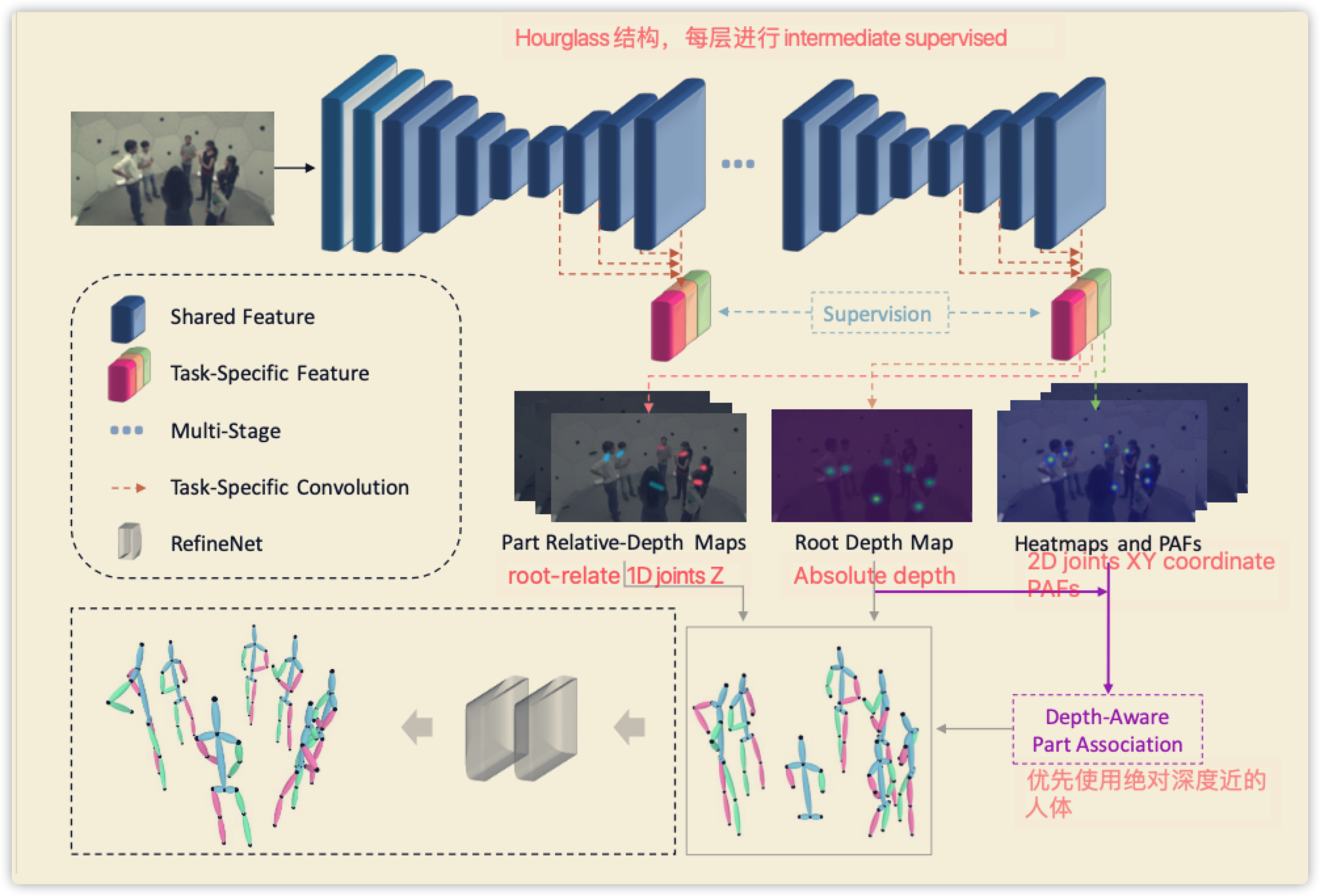
- 创新点是解决了人体遮挡重叠导致PAFs计算不准确问题(稠密人群非常常见)
做法也很简单,直接使用absolute root map获得的每个人远近进行排序,先计算近处的人体,也就等于遮挡的后计算,避免重叠。