摘要:人体识别系统是城市轨道交通自动售检票系统的关键组成部分。为了对人体识别系统中通行识别技术进行研究,采用对射式红外传感器采集通行目标的通行状态,在通道两侧分别安装传感器,在Matlab仿真的基础上将步态识别方法与人体识别规则相结合·分析闸机通道内通行目标的类型和数量,对其新型识别方法进行实验,实验结果表明该识别方法有效可靠。
关键词:红外传感器;Matlab仿真;步态识别;人体识别
0 引言
随着社会的进步,地铁作为城市轨道交通中的重要组成部分在人们的生活中发挥着至关重要的作用。传统方式逐步被新型方式取代,现在的自动售检票系统(Automatic Fare Collection system,AFC)是一种由中央处理单元控制的集自动售检票功能为一体的自动化处理系统。人体识别系统主要运行在闸机设备上,利用其内部的识别技术对乘客的行为进行识别,从而实现自动检票。系统中运用的通行识别技术是十分重要的环节,它是保证持票乘客正常通过、阻止无票乘客进出的“守门人”,在城市轨道交通中发挥着重要作用。
识别技术中的步态识别方法是重要的识别方式之一。步态识别方法是通过人体的通行特征来区分通行者和与通行者十分相似的物体,并且融合了计算机视觉技术、模式识别技术与视频图像序列识别技术,是特征生物技术的一个新兴研究领域,具有广阔的应用前景。本文利用Matlab实现对通道内通行目标进行仿真,综合步态识别技术进行识别验证,实验证明,借助Matlab平台对通道内通行的物体进行识别具有很好的准确性和可靠性。
1 人体识别系统
人体识别系统是城市轨道交通闸机中的核心部分,是闸机的“思维中枢”。闸机人体识别系统是由控制通行模块和闸机上的若干传感器组成,它将人体识别技术、现代传感器技术和计算机技术相结合,检测通行通道内通行目标的通行情况,将检测结果报告给控制通行模块,控制通行模块根据检测结果来控制闸机其他部分的工作。因此,人体识别系统的研究是整个闸机系统设计的关键,它的优劣不仅是衡量闸机性能的主要标准,而且还关系到整个自动售检票系统的成败。
闸机人体识别系统中的通行通道是由两台平行放置的闸机组成,对射式红外传感器分别布置在两端的闸机上,一端为传感器的发射端,另一端则为传感器的接收端。控制通行模块是人体识别系统的核心组件,是连接系统软件和硬件设置的中心纽带。当传感器检测到有目标进入通道时同时检查是否存在刷卡信号:如果不存在刷卡信号,则检查是否达到收费的身高要求,未达到收费的身高要求则打开扇门允许通过,如达到收费的身高要求则为非法通行并进行报警处理;如果存在刷卡信号,则查询进入通行通道的目标个数与刷卡次数是否一致,不一致则为非法通行并进行报警处理,一致则打开扇门使其通行,并且通过传感器再次检测离开通行通道的目标个数是否与刷卡次数一致,不一致则为非法通行并进行报警处理,一致则为合法通行。控制通行模块主要通过采集到的传感器的显示状态,分析得出通行目标的类型与数量,得出进入通道通行的人数,检查是否与刷卡时人数一致,如不同,则判别为非法通行启动报警装置;如相同,则打开扇门将其通过,并同时通过传感器检测通行目标离开通道时是否与刷卡时人数一致,不一致则判别为非法通行启动报警装置,一致则为合法通行。人体识别系统通行基本流程图如图1所示。

2 仿真实验
2.1 通道传感器布置
使用对射式红外传感器采集通道内通行目标,对射式红外传感器由发射端和接收端两部分组成,它可以用来检测在发射端和接收端之间是否存在通行目标。当在发射端和接收端之间不存在通行目标时,接收端则会接收到对应发射端发射的红外线,此时传感器所对应的工作状态为0;当在发射端和接收端之间存在通行目标时,通行目标会遮挡发射端发射的红外线,相对应的接收端则不会接收到红外线,此时传感器所对应的工作状态就变为1。则t时刻,所有的传感器状态均可以用0或者用1来显示。
本实验中根据GB 10000-1988中国成年人人体尺寸布置12对传感器,传感器1~4对用于检测通行目标是否进入通道,分别布置于小腿、大腿及臀部位置;传感器5~10对用于步态识别,分别布置于脚踝位置;传感器11~12对用于检测通行目标是否离开通道,布置于直立行走时臀部、坐时头部位置。状态数据分为四个部分,分别用1隔开,数据前三个部分分别对应三类传感器,最后一个部分为通行目标通行的时间。当t时刻通道内无人通行时,数据显示为10000,1000000,100,t。如图2所示,显示为无人通行时传感器状态图。图中0显示为白色,1则显示为黑色,横坐标对应数据显示格式。

2.2 通行识别方法
2.2.1 步态识别方法
步态识别是近年来计算机视觉和生物特征识别领域备受关注的一个研究方向,主要根据人体行走过程中双腿直立行走这一特殊行为特征进行身份识别。与其他生物特征识别技术(例如指纹、语音、人脸等)相比,步态识别的优势在于非接触性、非侵犯性、易于感知、难于隐藏、难于伪装。本实验的步态识别方法是借助对射式红外传感器对闸机通道内通行状态中人体与物体进行识别的方法,是在人体步态的XYT模型的基础上,通过对人体特殊的步态特征定义来区分人体与物体。
在含有传感器组成的通行通道内,人体行走与物体在通过传感器时会产生一系列与时间序列相联系的离散点,每个时间点传感器的状态则相应地反应出当时状态下人体与物体遮挡传感器的情况。在本实验中,借助Matlab仿真平台显示通行目标通过通道时传感器的状态,如果人体通过通道时,由于人体特殊的行走规律,会产生特殊的双绞线模型,而物体通过通道时,则是连续遮挡锯齿模型,对这些离散数据进行处理,人体识别系统则可以对人体与物体进行区分。人体通过时传感器状态如图3所示。
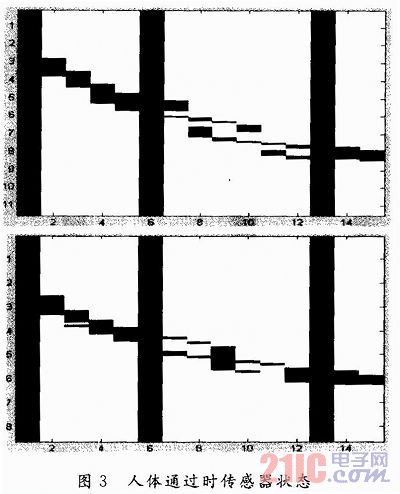
如图3所示,横坐标对应数据显示格式,显示传感器的状态,纵坐标代表时间(单位:s),中间6个传感器为步态检测传感器。人体的行走过程可以分为若干个步态周期的组合。在采集数据中可以看到,用于采集步态识别的传感器有数据缺失的现象,采样点的限制造成了数据的缺失,因此理论上传感器布置的数量越多,采集到的数据越充分,仿真效果就越准确,人体识别系统的识别率越高。但是,传感器数量的增多会带来很多其他问题,因此,要获得高的识别率还要进行大量实验以确定传感器数量的最佳值。
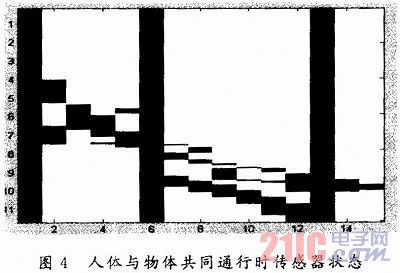
人体与物体共同通行时传感器状态如图4所示。从结果显示中可以看出人体的双脚步态特征:两脚前后遮挡传感器,一脚先遮挡传感器,另一只脚随后遮挡并且遮挡时间不一致。物体特征:一直遮挡传感器。由上述特征可以检测出通行通道中的通行目标的类型和数量,从而将检测结果传输给控制通行模块,以便更好地控制系统中其他设备的正常工作。
2.2.2 人体识别规则
人体识别规则是通过人体库综合通行规则方法对通行通道内的目标进行判定,由于采用之前所述传感器布置方案,人体识别可以对各种不同的人体通行情况进行有效识别。
人体库是对通行目标进行逐一分类,实现对已经在自动检票机刷卡即将在闸机通行通道内通行人体的识别,结合人体识别系统:按身高:身高低于130 cm的儿童不需要购票,只需针对高于130 cm的通行目标进行识别;按胖瘦:胖(包括女士怀孕)、正常、瘦;按穿着:显示两腿、显示三条腿(拐杖)、显示一条腿(残疾、穿长裙);按通行个数:单人通行、多人通行;多人通行间隔:紧贴、并排、正常。
通行规则是对不同人体通行过程中通行状态进行识别,实现对自动检票机刷卡即将在通道内通行人体的识别:人体正常行走;人体携带物体正常通行;人体非法通行。
人体识别规则是人体库综合通行规则的方法控制闸机的正常运行以实现对通道通行目标的识别。当单人通行时,如果出现单人爬行和单人跨越的现象,则认定为非法通行进行报警处理,其余认定为合法通行;如果多人通行出现紧贴、并排通行试图逃票者,则认定为非法通行进行报警处理,其余认定为合法通行。
3 结论
本文主要研究了城市轨道交通自动售检票系统中通行识别技术,在Matlab仿真的基础上结合步态识别方法与人体识别规则,并将其运用到自动检票机的人体识别系统中,摆脱了对图像检测技术的依赖,减少了自动检票机的设备成本,两者结合提高了自动检票机的设备性能,实验表明该设计可靠有效,为将来自动检票设备提供了新的设计方案。