1 贝叶斯方法
长久以来,人们对一件事情发生或不发生的概率
这种频率派的观点长期统治着人们的观念,直到后来一个名叫Thomas Bayes的人物出现。
1.1 贝叶斯方法的提出
托马斯·贝叶斯Thomas Bayes(1702-1763)在世时,并不为当时的人们所熟知,很少发表论文或出版著作,与当时学术界的人沟通交流也很少,用现在的话来说,贝叶斯就是活生生一民间学术“屌丝”,可这个“屌丝”最终发表了一篇名为“An essay towards solving a problem in the doctrine of chances”,翻译过来则是:机遇理论中一个问题的解。你可能觉得我要说:这篇论文的发表随机产生轰动效应,从而奠定贝叶斯在学术史上的地位。
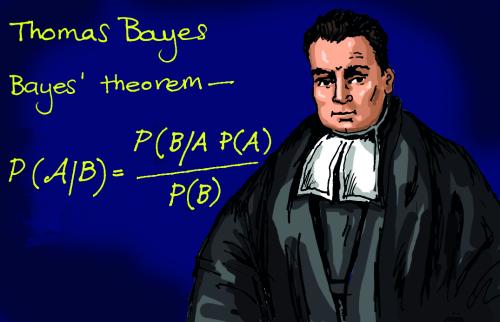
事实上,上篇论文发表后,在当时并未产生多少影响,在20世纪后,这篇论文才逐渐被人们所重视。对此,与梵高何其类似,画的画生前一文不值,死后价值连城。
回到上面的例子:“有一个袋子,里面装着若干个白球和黑球,请问从袋子中取得白球的概率θ是多少?”贝叶斯认为取得白球的概率
继续深入讲解贝叶斯方法之前,先简单总结下频率派与贝叶斯派各自不同的思考方式:
- 频率派把需要推断的参数θ看做是固定的未知常数,即概率
- 而贝叶斯派的观点则截然相反,他们认为参数
相对来说,频率派的观点容易理解,所以下文重点阐述贝叶斯派的观点。
贝叶斯派既然把
比如往台球桌上扔一个球,这个球落会落在何处呢?如果是不偏不倚的把球抛出去,那么此球落在台球桌上的任一位置都有着相同的机会,即球落在台球桌上某一位置的概率
至此,贝叶斯及贝叶斯派提出了一个思考问题的固定模式:
- 先验分布
+ 样本信息
后验分布
上述思考模式意味着,新观察到的样本信息将修正人们以前对事物的认知。换言之,在得到新的样本信息之前,人们对


其中,先验信息一般来源于经验跟历史资料。比如林丹跟某选手对决,解说一般会根据林丹历次比赛的成绩对此次比赛的胜负做个大致的判断,再比如,某工厂每天都要对产品进行质检,以评估产品的不合格率θ,经过一段时间后便会积累大量的历史资料,这些历史资料便是先验知识,有了这些先验知识,便在决定对一个产品是否需要每天质检时便有了依据,如果以往的历史资料显示,某产品的不合格率只有0.01%,便可视为信得过产品或免检产品,只每月抽检一两次,从而省去大量的人力物力。
而后验分布
综合起来看,则好比是人类刚开始时对大自然只有少得可怜的先验知识,但随着不断是观察、实验获得更多的样本、结果,使得人们对自然界的规律摸得越来越透彻。所以,贝叶斯方法既符合人们日常生活的思考方式,也符合人们认识自然的规律,经过不断的发展,最终占据统计学领域的半壁江山,与经典统计学分庭抗礼。
此外,贝叶斯除了提出上述思考模式之外,还特别提出了举世闻名的贝叶斯定理。
1.2 贝叶斯定理
在引出贝叶斯定理之前,先学习几个定义:
- 条件概率就是事件A在另外一个事件B已经发生条件下的发生概率。条件概率表示为P(A|B),读作“在B条件下A的概率”。
- 联合概率表示两个事件共同发生的概率。A与B的联合概率表示为
 或者
或者 。
。 - 边缘概率(又称先验概率)是某个事件发生的概率。边缘概率是这样得到的:在联合概率中,把最终结果中那些不需要的事件通过合并成它们的全概率,而消去它们(对离散随机变量用求和得全概率,对连续随机变量用积分得全概率),这称为边缘化(marginalization),比如A的边缘概率表示为P(A),B的边缘概率表示为P(B)。
接着,考虑一个问题:P(A|B)是在B发生的情况下A发生的可能性。
- 首先,事件B发生之前,我们对事件A的发生有一个基本的概率判断,称为A的先验概率,用P(A)表示;
- 其次,事件B发生之后,我们对事件A的发生概率重新评估,称为A的后验概率,用P(A|B)表示;
- 类似的,事件A发生之前,我们对事件B的发生有一个基本的概率判断,称为B的先验概率,用P(B)表示;
- 同样,事件A发生之后,我们对事件B的发生概率重新评估,称为B的后验概率,用P(B|A)表示;
贝叶斯定理便是基于下述贝叶斯公式:
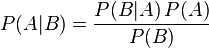
上述公式的推导其实非常简单,就是从条件概率推出。




1.3 应用:拼写检查
经常在网上搜索东西的朋友知道,当你不小心输入一个不存在的单词时,搜索引擎会提示你是不是要输入某一个正确的单词,比如当你在Google中输入“Julw”时,系统会提示你是不是要搜索“July”,如下图所示:

这叫做拼写检查。根据谷歌一员工写的文章显示,Google的拼写检查基于贝叶斯方法。下面我们就来看看,怎么利用贝叶斯方法,实现"拼写检查"的功能。
用户输入一个单词时,可能拼写正确,也可能拼写错误。如果把拼写正确的情况记做c(代表correct),拼写错误的情况记做w(代表wrong),那么"拼写检查"要做的事情就是:在发生w的情况下,试图推断出c。换言之:已知w,然后在若干个备选方案中,找出可能性最大的那个c,也就是求
而根据贝叶斯定理,有:

由于对于所有备选的c来说,对应的都是同一个w,所以它们的P(w)是相同的,因此我们只要最大化
即可。其中:
- P(c)表示某个正确的词的出现"概率",它可以用"频率"代替。如果我们有一个足够大的文本库,那么这个文本库中每个单词的出现频率,就相当于它的发生概率。某个词的出现频率越高,P(c)就越大。
- P(w|c)表示在试图拼写c的情况下,出现拼写错误w的概率。为了简化问题,假定两个单词在字形上越接近,就有越可能拼错,P(w|c)就越大。举例来说,相差一个字母的拼法,就比相差两个字母的拼法,发生概率更高。你想拼写单词July,那么错误拼成Julw(相差一个字母)的可能性,就比拼成Jullw高(相差两个字母)。
所以,我们只要找到与输入单词在字形上最相近的那些词,再在其中挑出出现频率最高的一个,就能实现
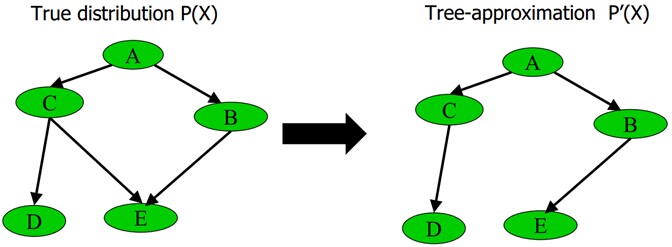
2 贝叶斯网络
贝叶斯网络(Bayesian network),又称信念网络(Belief Network),或有向无环图模型(directed acyclic graphical model),是一种概率图模型,于1985年由Judea Pearl首先提出。它是一种模拟人类推理过程中因果关系的不确定性处理模型,其网络拓朴结构是一个有向无环图(DAG)。
贝叶斯网络的有向无环图中的节点表示随机变量
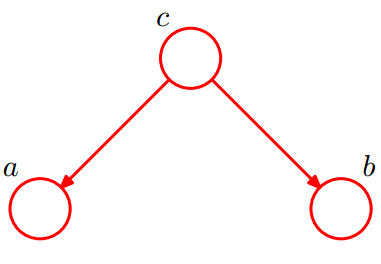
例如,假设节点E直接影响到节点H,即E→H,则用从E指向H的箭头建立结点E到结点H的有向弧(E,H),权值(即连接强度)用条件概率P(H|E)来表示,如下图所示:
简言之,把某个研究系统中涉及的随机变量,根据是否条件独立绘制在一个有向图中,就形成了贝叶斯网络。其主要用来描述随机变量之间的条件依赖,用圈表示随机变量(random variables),用箭头表示条件依赖(conditional dependencies)。
2.1 贝叶斯网络的定义
令G = (I,E)表示一个有向无环图(DAG),其中I代表图形中所有的节点的集合,而E代表有向连接线段的集合,且令X = (Xi)i ∈ I为其有向无环图中的某一节点i所代表的随机变量,若节点X的联合概率可以表示成:
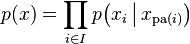
 表示节点i之“因”,或称pa(i)是i的parents(父母)。
表示节点i之“因”,或称pa(i)是i的parents(父母)。 
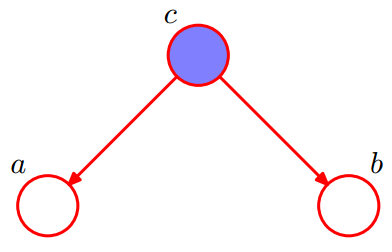
如下图所示,便是一个简单的贝叶斯网络:
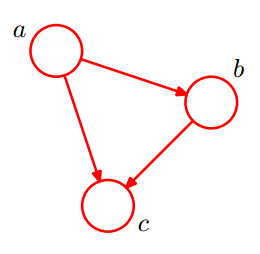
因为a导致b,a和b导致c,所以有

2.2 贝叶斯网络的实例
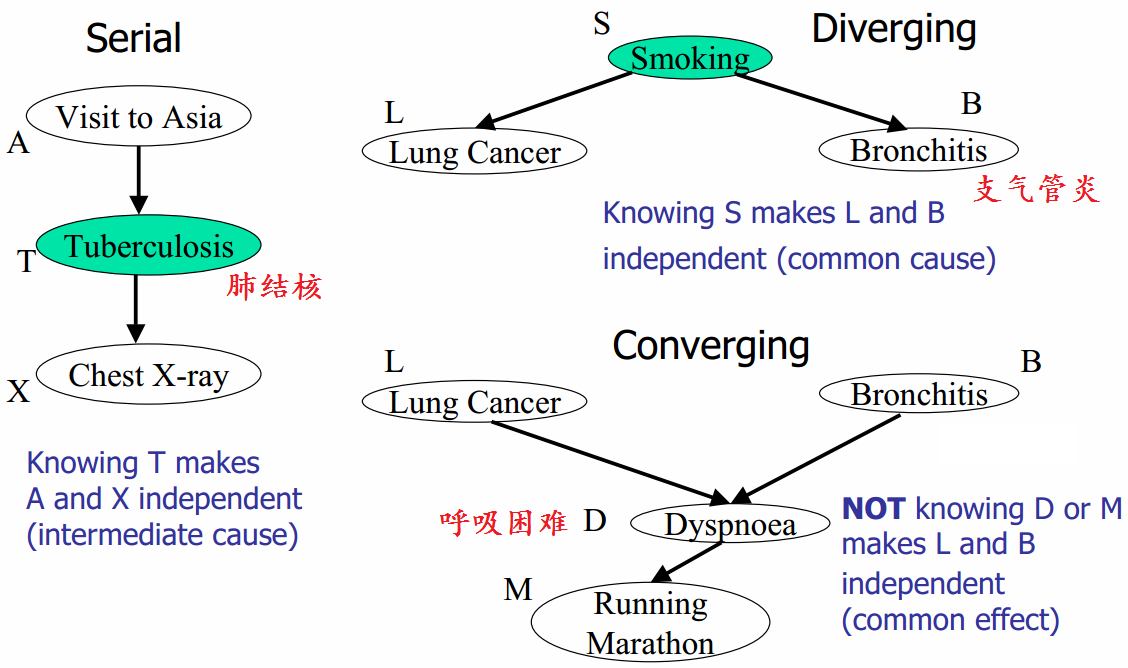
给定如下图所示的贝叶斯网络:
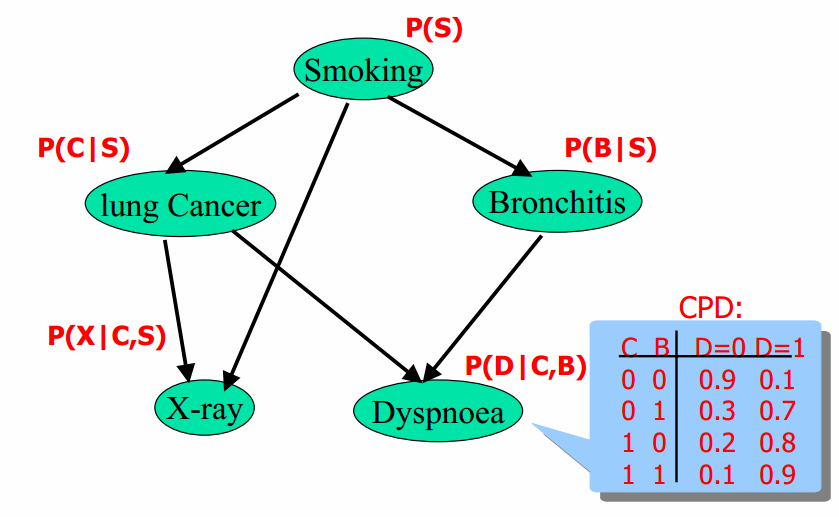
其中,各个单词、表达式表示的含义如下:
- smoking表示吸烟,其概率用P(S)表示,lung Cancer表示的肺癌,一个人在吸烟的情况下得肺癌的概率用P(C|S)表示,X-ray表示需要照医学上的X光,肺癌可能会导致需要照X光,吸烟也有可能会导致需要照X光(所以smoking也是X-ray的一个因),所以,因吸烟且得肺癌而需要照X光的概率用P(X|C,S)表示。
- Bronchitis表示支气管炎,一个人在吸烟的情况下得支气管炎的概率用P(B|S),dyspnoea表示呼吸困难,支气管炎可能会导致呼吸困难,肺癌也有可能会导致呼吸困难(所以lung Cancer也是dyspnoea的一个因),因吸烟且得了支气管炎导致呼吸困难的概率用P(D|C,B)表示。
lung Cancer简记为C,Bronchitis简记为B,dyspnoea简记为D,且C = 0表示lung Cancer不发生的概率,C = 1表示lung Cancer发生的概率,B等于0(B不发生)或1(B发生)也类似于C,同样的,D=1表示D发生的概率,D=0表示D不发生的概率,便可得到dyspnoea的一张概率表,如上图的最右下角所示。
2.3 贝叶斯网络的3种结构形式
给定如下图所示的一个贝叶斯网络,
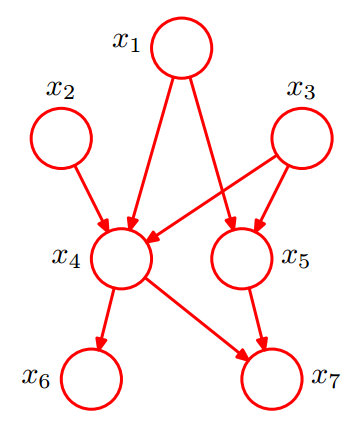
从图上可以比较直观的看出:
- 1. x1,x2,…x7的联合分布为

- 2. x1和x2独立(对应head-to-head);
- 3. x6和x7在x4给定的条件下独立(对应tail-to-tail)。
根据上图,第1点可能很容易理解,但第2、3点中所述的条件独立是啥意思呢?其实第2、3点是贝叶斯网络中3种结构形式中的其中二种。为了说清楚这个问题,需要引入D-Separation(D-分离)这个概念。
D-Separation是一种用来判断变量是否条件独立的图形化方法。换言之,对于一个DAG(有向无环图)E,D-Separation方法可以快速的判断出两个节点之间是否是条件独立的。
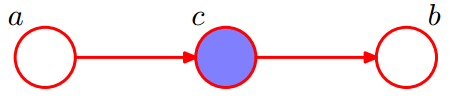
2.3.1 形式1:head-to-head
贝叶斯网络的第一种结构形式如下图所示:
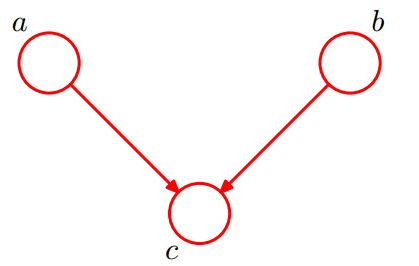
所以有:P(a,b,c) = P(a)*P(b)*P(c|a,b)成立,化简后可得:
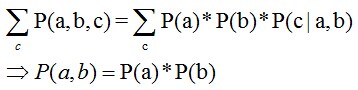
即在c未知的条件下,a、b被阻断(blocked),是独立的,称之为head-to-head条件独立,对应本节中最开始那张图中的“x1、x2独立”。
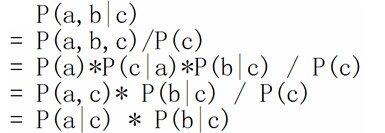
2.3.2 形式2:tail-to-tail
贝叶斯网络的第二种结构形式如下图所示
有P(a,b,c)=P(c)*P(a|c)*P(b|c),则:P(a,b|c)=P(a,b,c)/P(c),然后将P(a,b,c)=P(c)*P(a|c)*P(b|c)带入上式,得到:P(a,b|c)=P(a|c)*P(b|c)。
即在c给定的条件下,a,b被阻断(blocked),是独立的,称之为tail-to-tail条件独立,对应本节中最开始那张图中的“x6和x7在x4给定的条件下独立”。
2.3.3 形式3:head-to-tail
贝叶斯网络的第三种结构形式如下图所示:
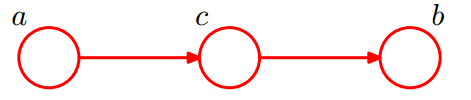
有:P(a,b,c)=P(a)*P(c|a)*P(b|c)。
化简后可得:
即:在c给定的条件下,a,b被阻断(blocked),是独立的,称之为head-to-tail条件独立。
插一句:这个head-to-tail其实就是一个链式网络,如下图所示:

在xi给定的条件下,xi+1的分布和x1,x2…xi-1条件独立。即:xi+1的分布状态只和xi有关,和其他变量条件独立,这种顺次演变的随机过程,就叫做马尔科夫链(Markov chain)。且有:

OK,今天在总结贝叶斯网络中的上述3种结构时,发现跟河流关系比较相像,比如:
- ①两条小河流入一条大河,叫head-to-head,由P(a,b,c)=P(c|a,b)P(b)P(a),可得:P(a,b) = P(a)*P(b),即c未知的条件下,a、b被阻断(blocked),是独立的。同时,也谓之汇连,且汇连是条件依赖的(C依赖于A、B的联合分布),汇连这种情况也称为一个v-结构;
- ②一条大河到某处分叉成两条支流,称之为tail-to-tail,由P(a,b,c)=P(b|c)P(a|c)P(c) ,可得:P(a,b|c)=P(a|c)*P(b|c),即在c给定的条件下,a,b被阻断(blocked),是独立的。同时,也谓之分连;
- ③一条大河流到底,中间不分叉不汇入其它河流,但可能其中的某段叫什么江,另一段叫什么江,称之为head-to-tail,由P(a,b,c)=P(b|c)P(c|a)P(a) ,化简可得:P(a,b,c)=P(a)*P(c|a)*P(b|c),即在c给定的条件下,a,b被阻断(blocked),是独立的。同时,也谓之顺连;
不知道读者对这个河流的比喻怎么看?^_^
接着,将上述结点推广到结点集,则是:对于任意的结点集A,B,C,考察所有通过A中任意结点到B中任意结点的路径,若要求A,B条件独立,则需要所有的路径都被阻断(blocked),即满足下列两个前提之一:
- A和B的“head-to-tail型”和“tail-to-tail型”路径都通过C;
- A和B的“head-to-head型”路径不通过C以及C的子孙;
最后,举例说明上述D-Separation的3种情况,则是如下图所示:
上图中左边部分是head-to-tail,右边部分的右上角是tail-to-tail,右边部分的右下角是head-to-head。
2.4 因子图
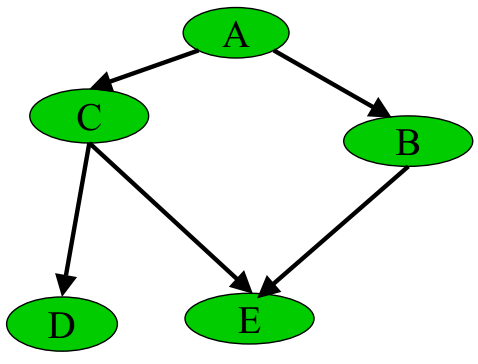
回到2.2节中那个实例上,如下图所示:

对于上图,在一个人已经呼吸困难的情况下,其抽样的概率是多少呢?即:
咱们来一步步计算推导下:
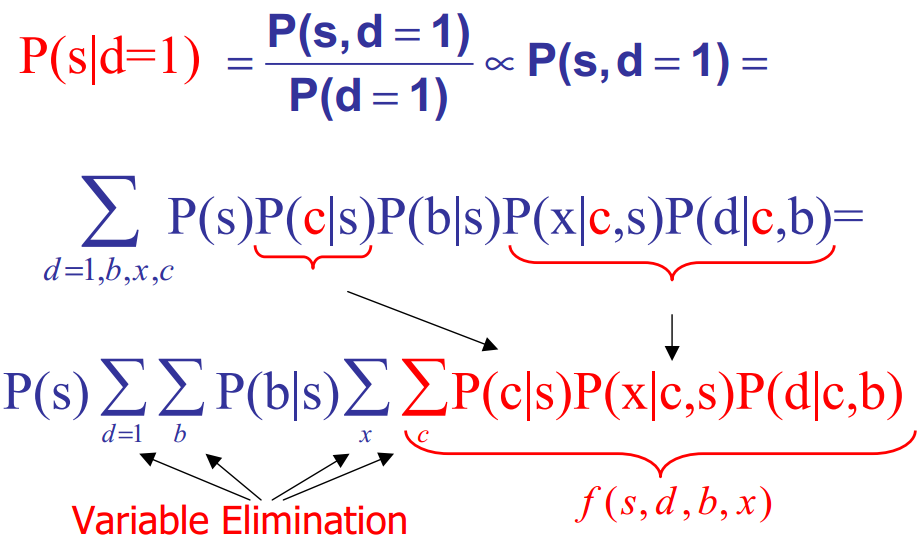
注:解释下上述式子的第二行到最后一行第三行的推导过程。最开始,所有变量都在sigma(d=1,b,x,c)的后面(sigma表示对“求和”的称谓),但由于P(s)和“d=1,b,x,c”都没关系,所以,可以提到式子的最前面。而且P(b|s)和x、c没关系,所以,也可以把它提出来,放到sigma(b)的后面,从而式子的右边剩下sigma(x)和sigma(c)。
此外,Variable elimination表示的是变量消除的意思。为了更好的解决此类问题,咱们得引入因子图的概念。
2.4.1 因子图的定义
wikipedia上是这样定义因子图的:将一个具有多变量的全局函数因子分解,得到几个局部函数的乘积,以此为基础得到的一个双向图叫做因子图(Factor Graph)。
比如,假定对于函数
其中

- 变量节点
- 因子(函数)节点
- 边
,边通过下列因式分解结果得到:在因子(函数)节点
和变量节点
之间存在边的充要条件是
存在。


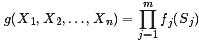
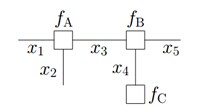
官方正式的定义果然晦涩!我相信你没看懂。通俗来讲,所谓因子图就是对函数进行因子分解得到的一种概率图。一般内含两种节点,变量节点和函数节点。我们知道,一个全局函数通过因式分解能够分解为多个局部函数的乘积,这些局部函数和对应的变量关系就体现在因子图上。举个例子,现在有一个全局函数,其因式分解方程为:

其中fA,fB,fC,fD,fE为各函数,表示变量之间的关系,可以是条件概率也可以是其他关系(如马尔可夫随机场Markov Random Fields中的势函数)。
为了方便表示,可以写成:

其对应的因子图为:
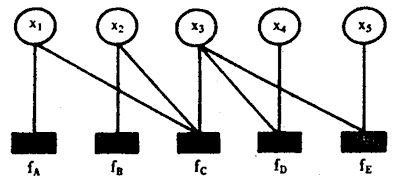
且上述因子图等价于:
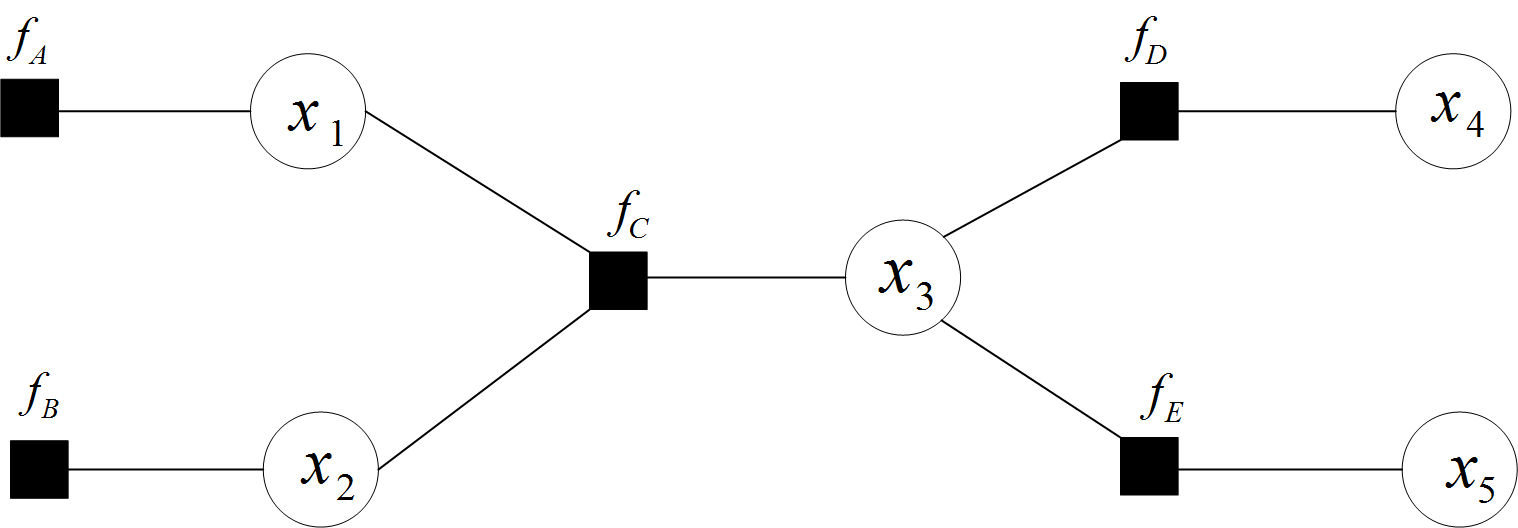
所以,在因子图中,所有顶点不是变量节点就是函数节点,边线表示它们之间的函数关系。
但搞了半天,虽然知道了什么是因子图,但因子图到底是干嘛的呢?为何要引入因子图,其用途和意义何在?事实上,因子图跟贝叶斯网络和马尔可夫随机场(Markov Random Fields)一样,也是是概率图的一种。从上文中,我们可以看到,在概率图中,求某个变量的边缘分布是常见的问题。这问题有很多求解方法,其中之一就是可以把贝叶斯网络或马尔科夫随机场转换成因子图,然后用sum-product算法求解。换言之,基于因子图可以用sum-product 算法高效的求各个变量的边缘分布。
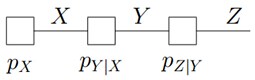
先举个例子说明如何把贝叶斯网络(和马尔科夫随机场)转换成因子图。给定下图所示的贝叶斯网络或马尔科夫随机场:
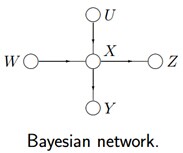
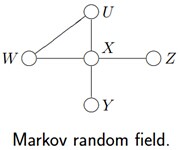
根据各个变量对应的关系,可得:

其对应的因子图为(以下两种因子图的表示方式皆可):
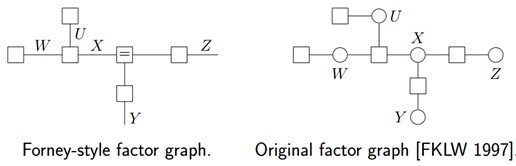
由上述例子总结出由贝叶斯网络构造因子图的方法:
- 贝叶斯网络中的一个因子对应因子图中的一个结点
- 贝叶斯网络中的每一个变量在因子图上对应边或者半边
- 结点g和边x相连当且仅当变量x出现在因子g中
举几个例子。比如,对于如下的一个因子图:
有:

而对于下图所示的马尔科夫链:
有:

另对于如下图所示的隐马尔科夫模型:
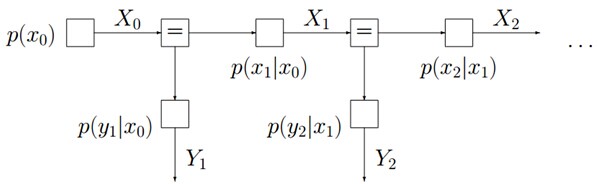
有:

2.4.2 Sum-product算法
下面,咱们来考虑一个问题:即如何由联合概率分布求边缘概率分布。
首先回顾下联合概率和边缘概率的定义,如下:
- 联合概率表示两个事件共同发生的概率。A与B的联合概率表示为或者。
- 边缘概率(又称先验概率)是某个事件发生的概率。边缘概率是这样得到的:在联合概率中,把最终结果中不需要的那些事件合并成其事件的全概率而消失(对离散随机变量用求和得全概率,对连续随机变量用积分得全概率)。这称为边缘化(marginalization)。A的边缘概率表示为P(A),B的边缘概率表示为P(B)。
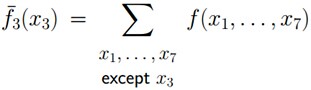
事实上,某个随机变量fk的边缘概率可由x1,x2,x3, ..., xn的联合概率求到,具体公式为:
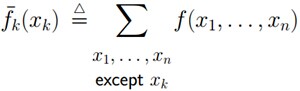
啊哈,啥原理呢?原理很简单,还是它:对x3外的其它变量的概率求和,最终剩下x3的概率!
此外,换言之,如果有

那么

上述式子如何进一步化简计算呢?考虑到我们小学所学到的乘法分配率,可知a*b + a*c = a*(b + c),前者2次乘法1次加法,后者1次乘法,1次加法。我们这里的计算是否能借鉴到分配率呢?别急,且听下文慢慢道来。
假定现在我们需要计算计算如下式子的结果:
同时,f 能被分解如下:
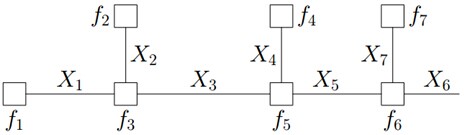
借鉴分配率,我们可以提取公因子:
因为变量的边缘概率等于所有与他相连的函数传递过来的消息的积,所以计算得到:
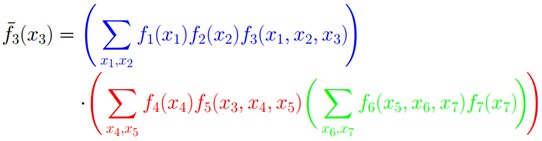
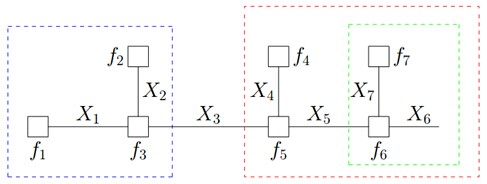
仔细观察上述计算过程,可以发现,其中用到了类似“消息传递”的观点,且总共两个步骤。
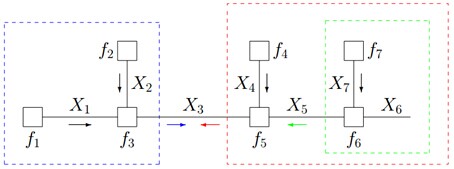
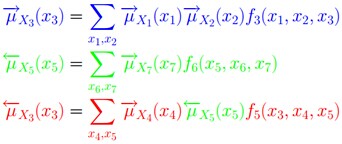
第一步、对于f 的分解图,根据蓝色虚线框、红色虚线框围住的两个box外面的消息传递:
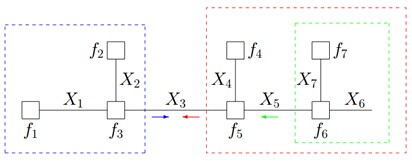
计算可得:
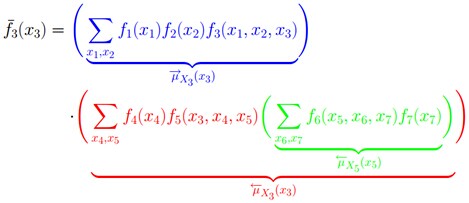
第二步、根据蓝色虚线框、红色虚线框围住的两个box内部的消息传递:
根据
就这样,上述计算过程将一个概率分布写成两个因子的乘积,而这两个因子可以继续分解或者通过已知得到。这种利用消息传递的观念计算概率的方法便是sum-product算法。前面说过,基于因子图可以用sum-product算法可以高效的求各个变量的边缘分布。
到底什么是sum-product算法呢?sum-product算法,也叫belief propagation,有两种消息:
- 一种是变量(Variable)到函数(Function)的消息:
,如下图所示
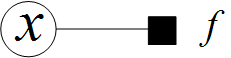
 。
。- 另外一种是函数(Function)到变量(Variable)的消息:
。如下图所示:
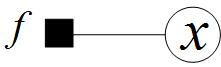
 。
。以下是sum-product算法的总体框架:
- 1、给定如下图所示的因子图:
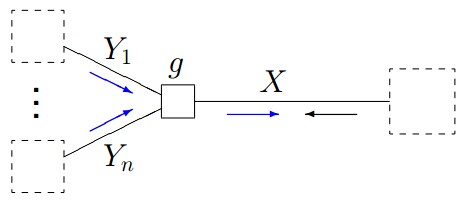
- 2、sum-product 算法的消息计算规则为:

- 3、根据sum-product定理,如果因子图中的函数f 没有周期,则有:

值得一提的是:如果因子图是无环的,则一定可以准确的求出任意一个变量的边缘分布,如果是有环的,则无法用sum-product算法准确求出来边缘分布。
比如,下图所示的贝叶斯网络:
其转换成因子图后,为:
可以发现,若贝叶斯网络中存在“环”(无向),则因此构造的因子图会得到环。而使用消息传递的思想,这个消息将无限传输下去,不利于概率计算。
解决方法有3个:
- 1、删除贝叶斯网络中的若干条边,使得它不含有无向环
- 2、重新构造没有环的贝叶斯网络
- 3、选择loopy belief propagation算法(你可以简单理解为sum-product 算法的递归版本),此算法一般选择环中的某个消息,随机赋个初值,然后用sum-product算法,迭代下去,因为有环,一定会到达刚才赋初值的那个消息,然后更新那个消息,继续迭代,直到没有消息再改变为止。唯一的缺点是不确保收敛,当然,此算法在绝大多数情况下是收敛的。
此外,除了这个sum-product算法,还有一个max-product 算法。但只要弄懂了sum-product,也就弄懂了max-product 算法。因为max-product 算法就在上面sum-product 算法的基础上把求和符号换成求最大值max的符号即可!
最后,sum-product 和 max-product 算法也能应用到隐马尔科夫模型hidden Markov models上,后面有机会的话可以介绍。