一、背景
- 单目摄像头无法求除某一个点的深度,在一条直线上的投影,在单目摄像头中都是同一个点。
- 因此要通过双目摄像头求出某一个景物点的深度z。
二、概念
1. 点
- 1.1 左成像点:PL
- 1.2 右成像点:PR
- 1.3 左光圈中心 OL
- 1.4 右光圈中心 OR
- 1.5 景物点P
2.距离
- 2.1 基线b:两个摄像头光圈中心之间的距离
- 2.2 左侧光心与左侧成像点距离 uL
- 2.3 右侧光心与右侧成像点距离 |uR|:uR为负数,但是经过取绝对值后,就变成了整数
- 2.4 景物点与光圈中心的距离 z
- 2.5 焦距f:成像点与光圈中心的距离
- 2.6 视差d :uL+|uR|
3.两个三角形
【P-PL-PR 】与【 P-OL-OR】
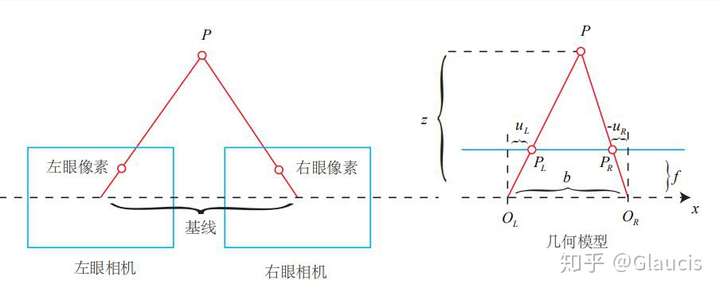
三、测距公式关系
为两个【相似三角形】关系,即(b-uL-uR)/b=(z-f)/z 可推导出:z=fb/d 从而得出深度z
注:公式请自行推导,有助于加深理解。