sigqueue函数原型:
函数作用:新的发送信号系统调用,主要是针对实时信号提出的支持信号带有参数,与函数sigaction()配合使用
int sigqueue(pid_t pid, int signo, const union sigval value);
分析:
- 第一个参数: 指定接收信号的进程id
- 第二个参数:确定即将发送的信号
- 第三个参数:是一个联合结构体union sigval,指定了信号传递的参数,即通常所说的4字节值
程序清单
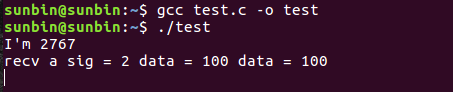
1. 测试代码:
- 发送端
1 #include <stdlib.h> 2 #include <stdio.h> 3 #include <string.h> 4 #include <signal.h> 5 #include <unistd.h> 6 7 int main(int argc, char *argv[]) 8 { 9 if(argc != 2) 10 { 11 fprintf(stderr, "Usage %s pid ", argv[0]); 12 exit(0); 13 } 14 pid_t pid = atoi(argv[1]); 15 union sigval v; 16 v.sival_int = 100; 17 sigqueue(pid, SIGINT, v); 18 sleep(3); 19 return 0; 20 }
- 接收端
1 #include <string.h> 2 #include <signal.h> 3 #include <unistd.h> 4 #include <stdlib.h> 5 #include <stdio.h> 6 7 void handler(int sig, siginfo_t *info, void *ctx) 8 { 9 printf("recv a sig = %d data = %d data = %d ", sig, info->si_value.sival_int, info->si_int); 10 } 11 12 int main(int argc, char *argv[]) 13 { 14 printf("I'm %d ", getpid()); 15 struct sigaction act; 16 act.sa_sigaction = handler; 17 sigemptyset(&act.sa_mask); 18 act.sa_flags = SA_SIGINFO; 19 20 if(sigaction(SIGINT, &act, NULL) < 0) 21 { 22 perror("sigaction error"); 23 exit(0); 24 } 25 for(; ;) 26 pause(); 27 return 0; 28 }
输出结果:
- 发送端

- 接收端
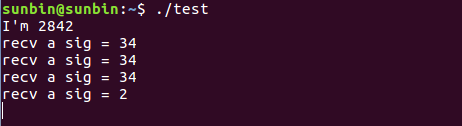
2. 测试代码
- 发送端
1 #include <stdlib.h> 2 #include <stdio.h> 3 #include <string.h> 4 #include <signal.h> 5 #include <unistd.h> 6 7 int main(int argc, char *argv[]) 8 { 9 if(argc != 2) 10 { 11 fprintf(stderr, "Usage %s pid ", argv[0]); 12 exit(0); 13 } 14 pid_t pid = atoi(argv[1]); 15 union sigval v; 16 v.sival_int = 100; 17 sigqueue(pid, SIGINT, v); 18 sigqueue(pid, SIGINT, v); 19 sigqueue(pid, SIGINT, v); 20 sigqueue(pid, SIGRTMIN, v); 21 sigqueue(pid, SIGRTMIN, v); 22 sigqueue(pid, SIGRTMIN, v); 23 sleep(3); 24 kill(pid, SIGUSR1); 25 return 0; 26 }
- 接收端
1 #include <string.h> 2 #include <signal.h> 3 #include <unistd.h> 4 #include <stdlib.h> 5 #include <stdio.h> 6 7 void handler(int sig) 8 { 9 if(sig == SIGINT || sig == SIGRTMIN) 10 printf("recv a sig = %d ", sig); 11 else if(sig == SIGUSR1) 12 { 13 sigset_t s; 14 sigemptyset(&s); 15 sigaddset(&s, SIGINT); 16 sigaddset(&s, SIGRTMIN); 17 sigprocmask(SIG_UNBLOCK, &s, NULL); 18 } 19 } 20 21 int main(int argc, char *argv[]) 22 { 23 printf("I'm %d ", getpid()); 24 struct sigaction act; 25 act.sa_sigaction = handler; 26 sigemptyset(&act.sa_mask); 27 act.sa_flags = 0; 28 29 sigset_t s; 30 sigemptyset(&s); 31 sigaddset(&s, SIGINT); 32 sigaddset(&s, SIGRTMIN); 33 sigprocmask(SIG_BLOCK, &s, NULL); 34 if(sigaction(SIGINT, &act, NULL) < 0) 35 { 36 perror("sigaction error"); 37 exit(0); 38 } 39 if(sigaction(SIGRTMIN, &act, NULL) < 0) 40 { 41 perror("sigaction error"); 42 exit(0); 43 } 44 if(sigaction(SIGUSR1, &act, NULL) < 0) 45 { 46 perror("sigaction error"); 47 exit(0); 48 } 49 for(; ;) 50 pause(); 51 return 0; 52 }
输出结果
- 发送端

- 接收端