卷积神经网络中的反向传播
反向传播是梯度下降法在神经网络中应用,反向传播算法让神经网络的训练成为来可能。
首先要弄清一点,神经网络的训练过程就是求出一组较好的网络权值的过程。反向传播的直观解释就是先用当前网络的权值计算结果,然后根据计算结果和真实结果的差值来更新网络的权值,使得计算结果和真实结果的差值越来越小。
当然要想准确的理解反向传播,你需要知道:梯度的概念,梯度下降法,复合函数求导的链式法则。
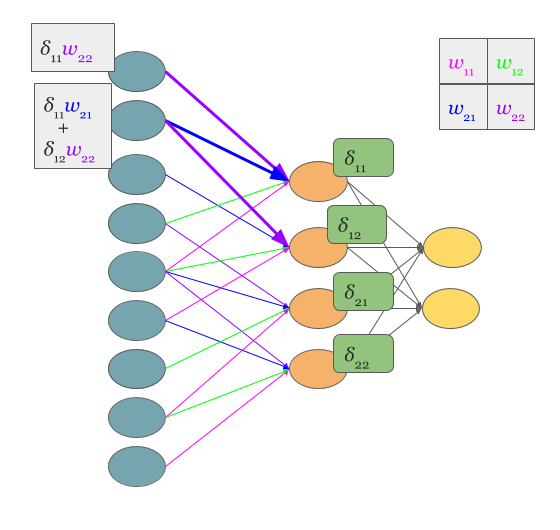
在多层感知机中,反向传播比较简单,要计算当前节点的误差(delta),只需要根据后一层节点的误差和当前节点的连接权重相乘后求和,如下图。

那么,在卷积神经网络中的反向传播也会和多层神经网络中的一样吗?
先来看一下多层感知机和卷积神经网络的关系:
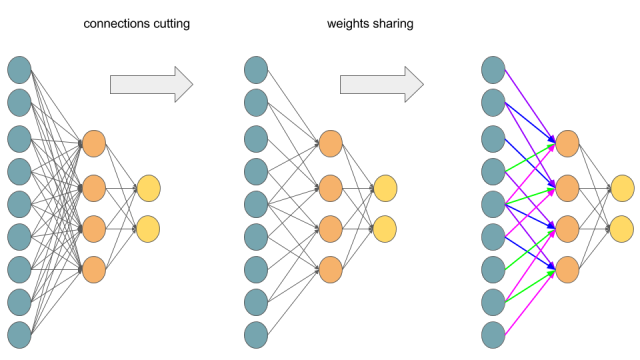
可以看到,实际上,多层感知机可以通过去除一部分的网络连接并且共享权值(上图相同颜色的连接表示,连接权值相等)转化为卷积神经网络。
可能你会说上图最右边看起来并不像一个卷积神经网络,那么请看下图:
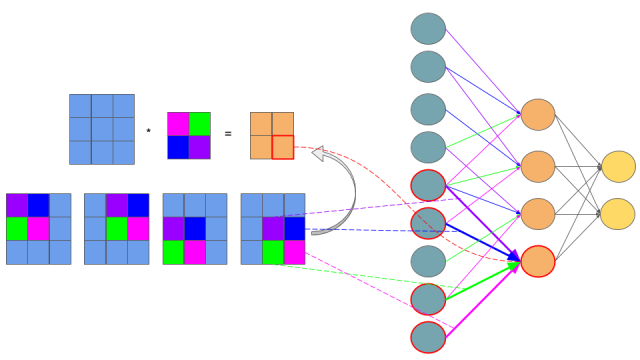
解释:
- 输入层的9个节点是3×3原始图像的9个像素
- 卷积核是2×2大小的,用4种颜色表示不同位置
- 3×3图像经过2×2卷积操作后得到2×2图像,即网络中间层的4个节点。
- 四个角的像素各自只参与一次卷积计算,因此只有一条连接到下一层节点,而中间位置的像素参与4次卷积计算,到下一层节点有四个连接。
所以,在卷积神经网络(CNN)的反向传播的节点误差(delta)也可以像之前的多层感知机一样计算:
通常,为了便于计算,反向传播计算误差时同样使用卷积来表示,这时需要将卷积核做180度旋转(原因见下面公式推导):


在前向计算的过程中,使用的是valid卷积方式,卷积操作的对象是前一层的输出,而在后向传播中使用的full卷积方式,卷积操作的对象是后一层传回的误差。
接下来会进行一些公式推导:
在多层感知机中,第(l)层节点(j)的误差(偏导)为:(delta^l_j = frac{partial C}{partial z^l_j}),
其中:$z^{l_j}= sumlimits_{k} w^l_{jk} a^{l-1}_k + b^l_j $,
令(a_j^l = sigma(z_j^l))
其中(sigma)表示sigmoid, tanh或者relu等激活函数。
在卷积神经网络中,使用(z_{x,y})代替(z_{j}),得到前向过程的卷积计算(z_{x,y}^{l+1} = w^{l+1} * sigma(z_{x,y}^l) + b_{x,y}^{l+1} = sum limits_{a} sum limits_{b} w_{a,b}^{l+1}sigma(z_{x-a,y-b}^l)+ b_{x,y}^{l+1}),
在卷积神经网络中节点(j)的偏导为:$ delta_{x,y}^l = frac{partial C}{partial z_{x,y}^l} =sum limits_{x'} sum limits_{y'}frac{partial C}{partial z_{x',y'}^{l+1}}frac{partial z_{x',y'}^{l+1}}{partial z_{x,y}^l}(
而)z_{x,y}l$的误差是由$z_{x,y}{l+1}$传导而来,因此使用链式法则有:
由于只有下标为(x=x'-a)和(y=y'-b)的项的误差会传给(z_{x,y}^l),其它项的偏导为0,所以$$ sum limits_{x'} sum limits_{y'} delta_{x',y'}^{l+1} frac{partial(sumlimits_{a}sumlimits_{b}w_{a,b}^{l+1}sigma(z_{x'-a, y'-b}^l) + b_{x',y'}^{l+1})}{partial z_{x,y}^l} = sum limits_{x'} sum limits_{y'} delta_{x',y'}^{l+1} w_{a,b}^{l+1} sigma'(z_{x,y}^l)$$
而当(x=x'-a)和(y=y'-b)时,有(a=x'-x),(b=y'-y),所以上式可以写成
上式中(rot_{180^circ}(w_{x,y}^{l+1}) = w_{-x, -y}^{l+1}),因此在反向传播计算误差时需要将卷积核旋转180°
接下来计算误差受权值(w_{a,b}^l)的影响$frac{partial C}{partial w_{a,b}^l} $
所以在卷积神经网络中的训练过程如下:
- 输入x
- 前向过程:对每一个网络层l=2,3, …,L,计算$ z_{x,y}^l = w^l * sigma(z_{x,y}^{l-1}) + b_{x,y}^l , a_{x,y}^l = sigma(z_{x,y}^l)$
- 输出误差(delta^L):计算向量$ delta^L = abla_a C odot sigma'(z^L)$
- 误差反向传播:对每一个网络层l=L-1,L-2,…,2,计算(delta_{x,y}^l =delta^{l+1} * rot_{180^circ}(w_{x,y}^{l+1}) sigma'(z_{x,y}^l))
- 根据梯度更新参数:成本函数的梯度由下式给出$ frac{partial C}{partial w_{a,b}^l} =delta_{a,b}^l * sigma(rot_{180circ}(z_{a,b}{l-1})) $
References:
Convolutional Neural Networks backpropagation: from intuition to derivation
Backpropagation In Convolutional Neural Networks