1、安装最新版本的ZED SDK
cd ~/catkin_ws/src git clone https://github.com/stereolabs/zed-ros-wrapper.git cd ../ rosdep install --from-paths src --ignore-src -r -y catkin_make -DCMAKE_BUILD_TYPE=Release source ./devel/setup.bash
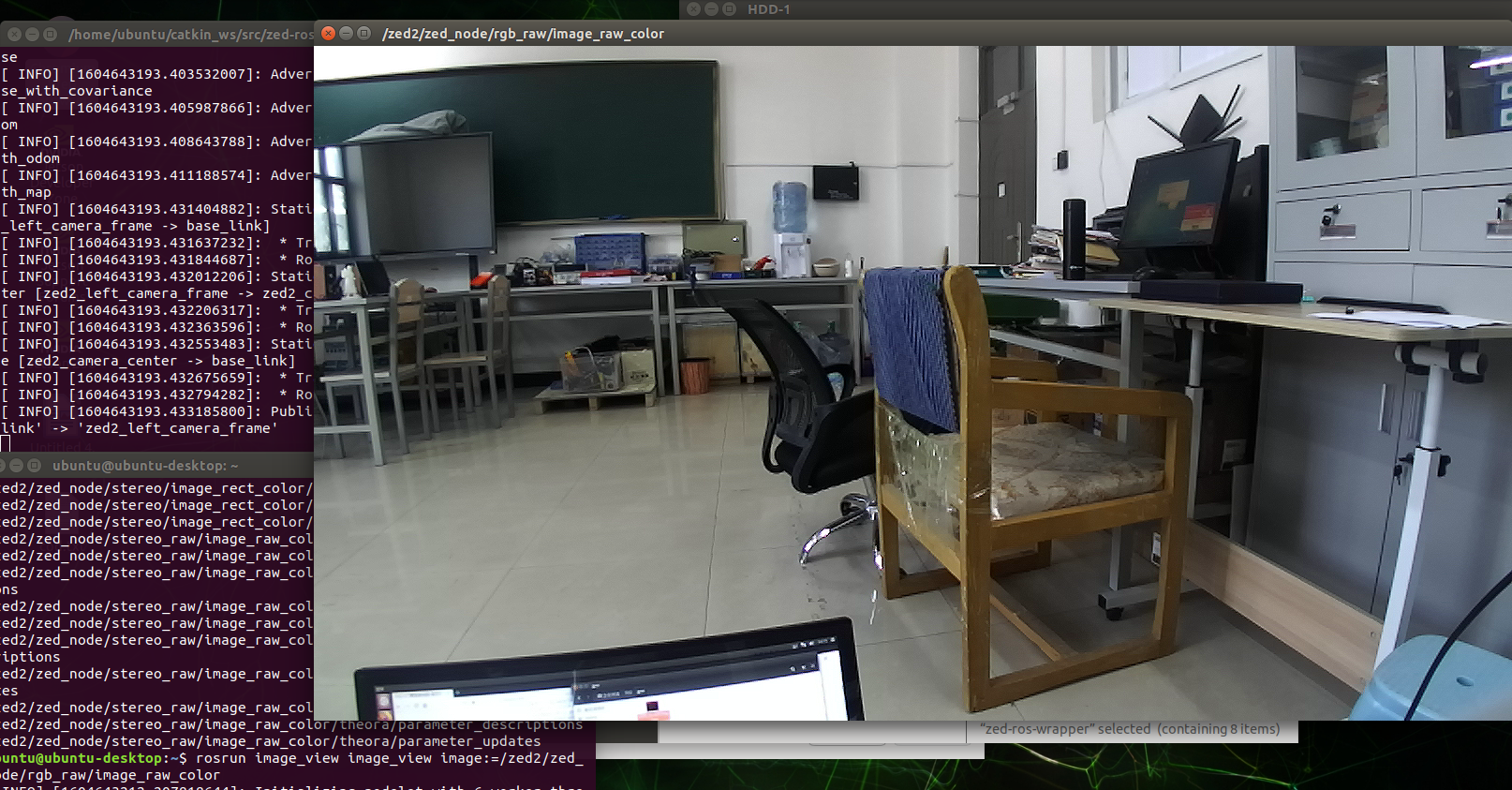
2、测试ZED
roslaunch zed_wrapper zed2.launch #启动ZED节点 rostopic list #查看ZED纤细列表 rosrun image_view image_view image:=/zed2/zed_node/rgb_raw/image_raw_color #查看画面