1. tracker = cv2.multiTracker_create() 获得追踪的初始化结果
2.cv2.TrackerKCF_create() 获得KCF追踪器
3.cv2.resize(frame, (w, h), cv2.INTER_AEAR) # 进行图像大小的重新变化
参数说明:frame表示输入图片,(w, h) 表示变化后的长和宽, cv2.INTER_AEAR表示插值的方法
4.cv2.selectROI(‘Frame’, frame, fromCenter=False,showCrosshair) 在图像上进行选框操作
参数说明:‘Frame'表示图片的名字,frame表示读取的图片,fromCenter表示选框的起点是否在中心位置,showCrosshair表示是否展示选框
KCF是一种鉴别式追踪方法,这类方法一般在追踪过程中训练一个目标检测器,使用目标检测器与预测下一个阶段预测位置是否是目标,然后使用新检测结果去跟新训练集而跟新目标检测其
KCF贡献
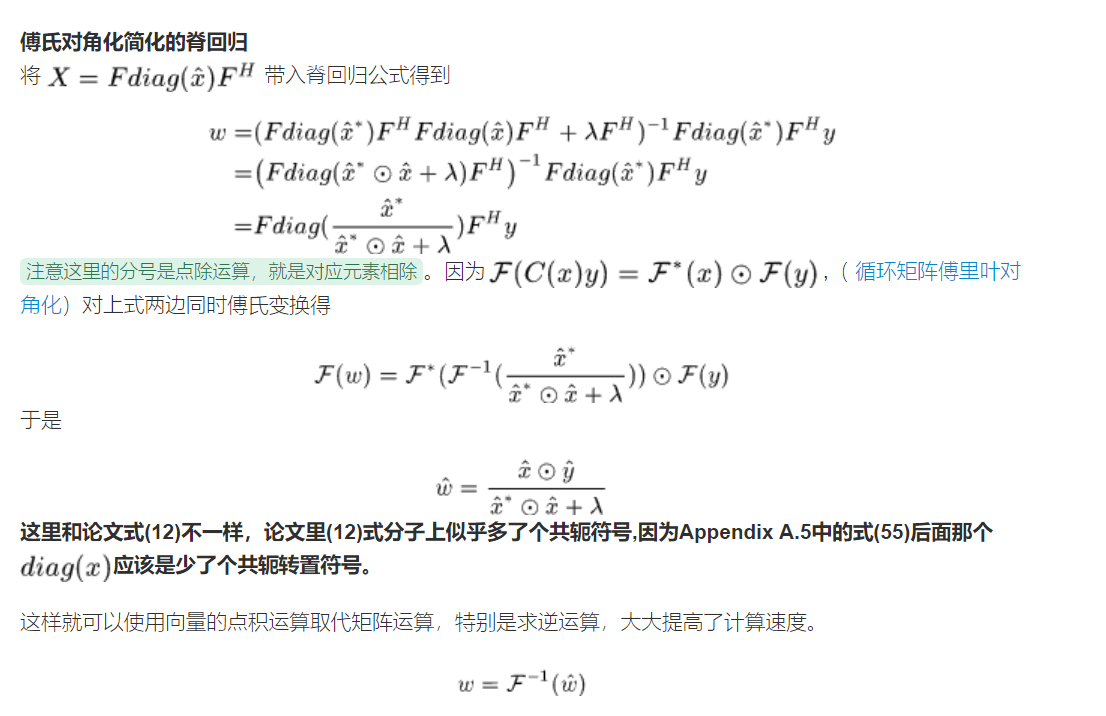
1.使用脊回归训练目标检测器,成功利用循环矩阵在傅里叶空间对角化的性质,将矩阵的运算转换为向量的Hadamad积,即元素的点乘,大大降低了运算量,提高了运算速度
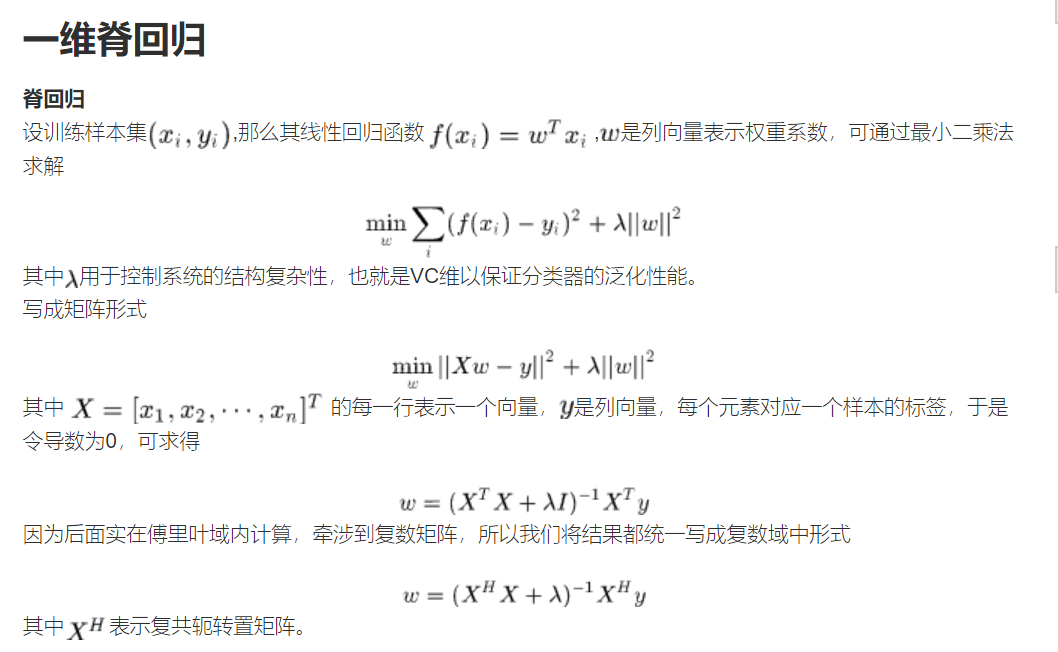
1.脊回归,在原有的基础上引入了λ|w^2| 为了防止过拟合的出现,即w的分布更小且更加均匀(0, 0, 0, 1) 和 (0.25, 0.25, 0.25, 0.25), 对w进行求导,导数为0,解得w
2.循环矩阵,即训练图像都是通过目标样本的循环位移得到的, 通过PxQ进行x轴和y轴的平移变化

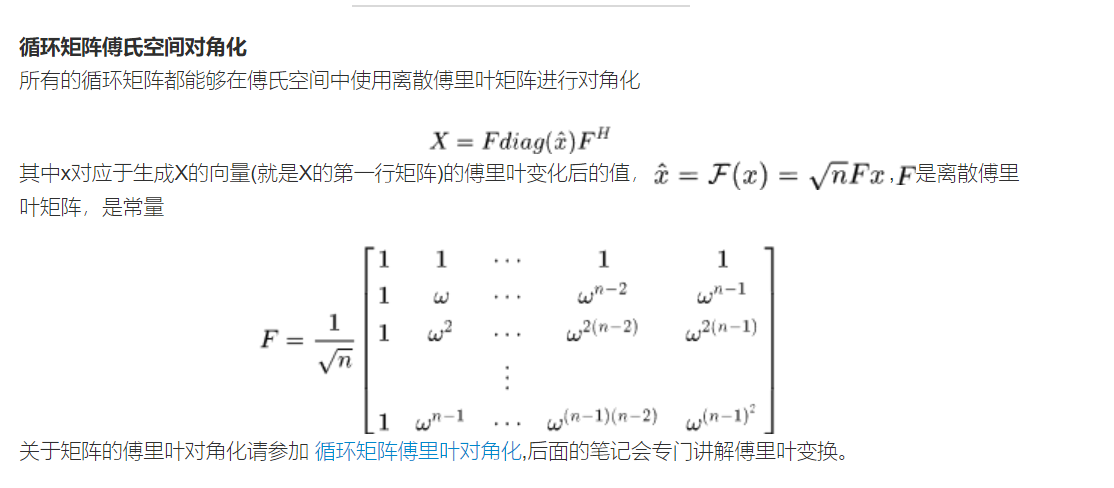
3.傅氏空间矩阵对角化, 即对上述的循环空间做一个傅里叶变化
4. 将循环矩阵x带入到脊回归进行求解
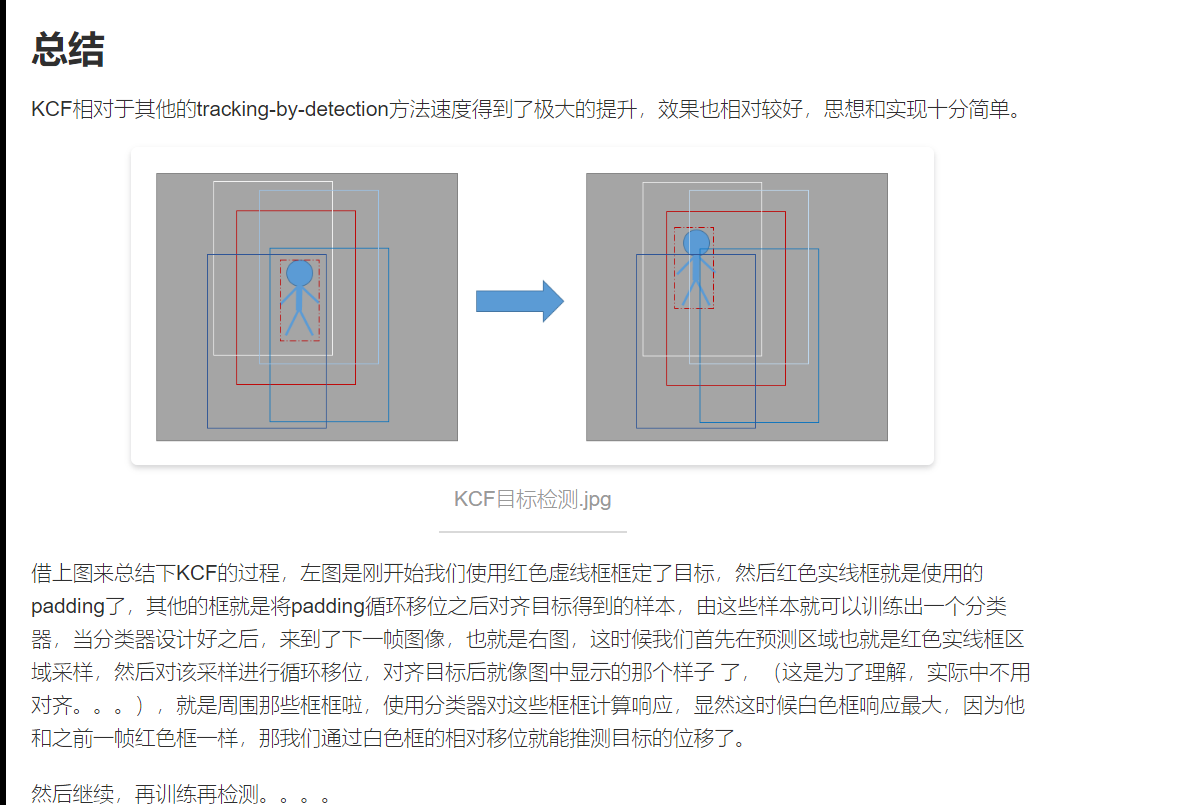
最后做的一个总结部分
参考链接:https://www.cnblogs.com/YiXiaoZhou/p/5925019.html
代码:
第一步: 进行 argparse参数设置
第二步:使用字典构造已有的追踪目标的方法
第三步:使用cv2.multiTracker_create() 构造出追踪器集合trackers
第四步:使用cv2.capture进行视频的读入
第五步:while True循环,使用cv2.read() 读入图片
第六步:使用cv2.resize进行图片的放缩变换
第七步:trackers.apply(frame)对图片运用追踪算法
第八步:循环boxes对图像进行画图操作
第九步:展示图片,
第十步:并判断按键,如果按s,进行box的添加,如果按ESC键就退出
第十一步:如果按s,使用box = cv2.selectROI()进行区域的选择,并使用trackers.add将追踪器和图片,以及区域进行添加
import argparse import cv2 import time # 第一步进行参数设置 ap = argparse.ArgumentParser() ap.add_argument('-v', '--video', type=str, default='videos/soccer_01.mp4', help='path to input video file') ap.add_argument('-t', '--tracker', type=str, default='kcf', help='Opencv object tracker type') args = vars(ap.parse_args()) # opencv已经实现的追踪算法 # 第二步:构造cv2已有追踪算法的列表 OPENCV_OBJECT_TRACKERS = { "csrt": cv2.TrackerCSRT_create, "kcf": cv2.TrackerKCF_create, "boosting": cv2.TrackerBoosting_create, "mil": cv2.TrackerMIL_create, "tld": cv2.TrackerTLD_create, "medianflow": cv2.TrackerMedianFlow_create, "mosse": cv2.TrackerMOSSE_create } # 第三步:实例化追踪器 # 实例化Opencv's multi-object tracker trackers = cv2.MultiTracker_create() # 第四步:使用cv2.VideoCapture读取视频 vs = cv2.VideoCapture(args['video']) while True: # 第五步:读入第一张图片 frame = vs.read() frame = frame[1] # 到头了就结束 if frame is None: break # 第六步:使用cv2.resize对图像进行长宽的放缩操作 h, w = frame.shape[:2] width = 600 r = width / float(w) dim = (width, int(r * h)) frame = cv2.resize(frame, dim, cv2.INTER_AREA) # 第七步:使用trackers.apply获得矩形框 (success, boxes) = trackers.update(frame) # 第八步:循环多组矩形框,进行画图操作 for box in boxes: (x, y, w, h) = [int(v) for v in box] cv2.rectangle(frame, (x, y), (x+w, y+h), (0, 255, 0), 2) # 第九步:进行图像展示 cv2.imshow('Frame', frame) # 第十步:判断按键,如果是s的话,进行画出新的box key = cv2.waitKey(100) & 0xff if key == ord('s'): # 第十一步:选择一个区域,按s键,并将tracker追踪器,frame和box传入到trackers中 box = cv2.selectROI('Frame', frame, fromCenter=False, showCrosshair=True) tracker = OPENCV_OBJECT_TRACKERS[args['tracker']]() trackers.add(tracker, frame, box) elif key == 27: break vs.release() cv2.destroyAllWindows()

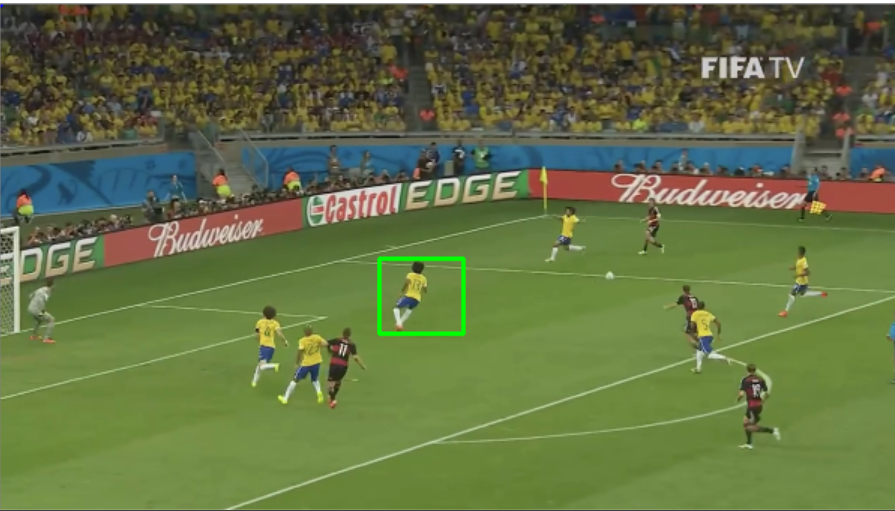
区域选择 追踪效果