[20个项目学会BBC micro:bit编程]网易云课堂视频教程 点击这里
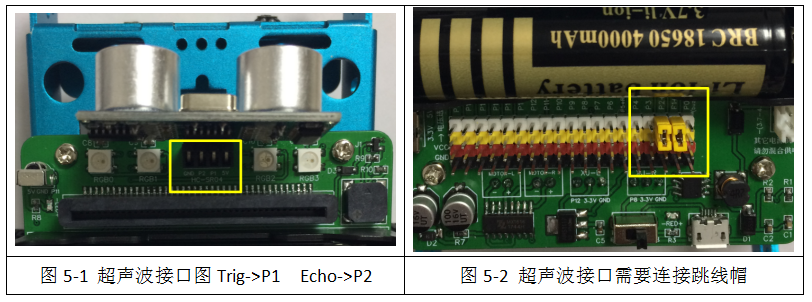
--硬件连接
注意,一定要先插上图5-2中所示的跳线帽(跳线帽的作用是用来连接超声波)
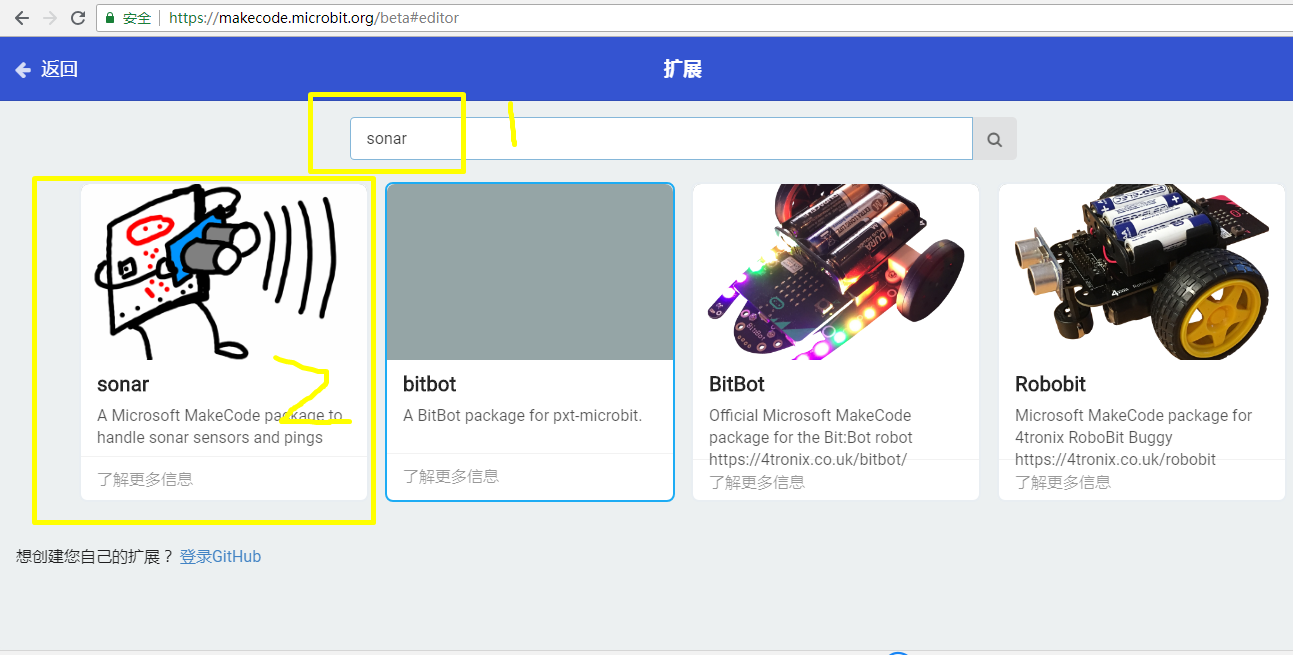
--实验编程
第一步:在扩展中搜索 “sonar”这个关键词,找到sonar这个扩展包
第二步:设置变量,可以随便起一个变量名为 distance



第三步:实现简单的超声波测距程序

程序网址:https://makecode.microbit.org/_8AcKLXMT4MVc (简单,与上图一致)
M-robot超声波避障程序:https://makecode.microbit.org/_JhzVFRc39Emt(稍复杂)
--实验结果
移动超声波模块,会发现超声波检测到的距离在不断变化。
注意事项:
1.一定记得连接蜂鸣器跳线帽,否则显示的数字一直为0
2.因为需要不停地检测距离,所以要将程序块放到无线循环中,不要放到当开机时里面。
3.要加一个 暂停 100ms, 因为超声波测距需要先发送超声波,然后再接收,再进行信号处理,需要一定的时间,不加暂停,程序执行太快。检测距离可能达不到预期。
4.仔细检测Trig是不是接到了P1, Echo是不是接到了P2,如果不是要根据实际接线修改程序。
拓展知识:
市面上目前在售的超声波模块有很多种,有的有5个针脚,有的有4个针脚,有的需要在5V电压下才能工作,有的可以在3.3V电压下才能工作。所以如果你随便拿一个超声波,用上面的程序不一定能得到想要的实验结果,极有可能是电压没有达到要求。
最好的解决办法是买3.3V兼容的。我们提供的超声波模块完全与M-robot匹配,无需担心硬件问题,只需要大胆编程就可以了。
