一个典型的多关节机器人如图所示。

机械手动力学模型的特点:
1、动力学模型包含的项数多。随着机器人关节数的增加,方程中包含的项数增加。
2、高度非线性,方程的每一项都含有正弦余弦等非线性因素。
3、高度耦合。
4、模型不确定性和时变性。当机器人搬运物体时,由于所持物件不同,负载会发生变化,另外,关节的摩擦力矩也会随时间变化。
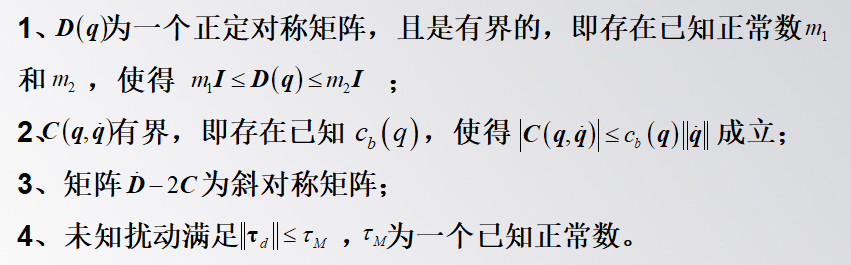
机械手动力学模型有以下几个特性:
一个典型的多关节机器人如图所示。
机械手动力学模型的特点:
1、动力学模型包含的项数多。随着机器人关节数的增加,方程中包含的项数增加。
2、高度非线性,方程的每一项都含有正弦余弦等非线性因素。
3、高度耦合。
4、模型不确定性和时变性。当机器人搬运物体时,由于所持物件不同,负载会发生变化,另外,关节的摩擦力矩也会随时间变化。
机械手动力学模型有以下几个特性: