53.3 硬件原理图
53.3.1 RS232
<ignore_js_op>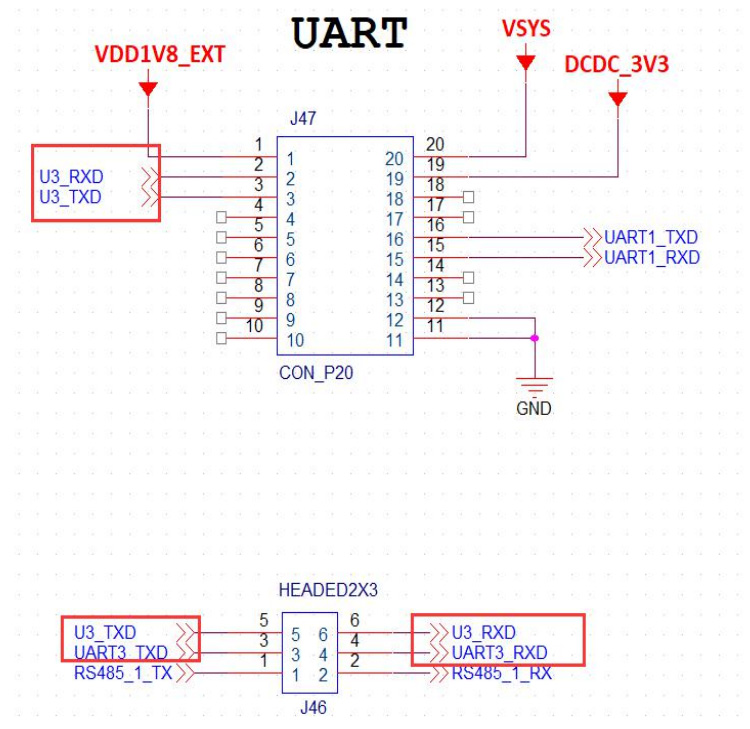
UART3 通过跳线帽 J46 来设置成 TTL 电平的 RS232 信号。连接 J46 的 3-5 和 4-6 后,UART3 通过 TTL 电平输出。
53.3.2 RS485
<ignore_js_op>
RS485 通过 SP3485 芯片将串口信号转换为 RS485 信号,RE 是接收使能信号(低电平有效),OE 是发送使能信号(高电平有效)。在图中 RE 和 OE 经过一系列的电路,最终通过 RS485_1_TX 来控制,这样我们可以省掉一个 RS485 收发控制 IO,将 RS485 完全当作一个串口来使用,方便我们写驱动。
53.4 RS232 驱动
I.MX6U 的 UART 驱动 NXP 已经编写好了,所以不需要我们编写。我们需要做的就是在设备树中添加 UART3 对应的设备节点即可。
53.4.1 设备树添加 UART3 节点
打开 topeet_emmc_4_3.dts 文件,首先添加 UART3 对应的 pinctrl 子节点,在 iomuxc 中添加如下内容:
1 pinctrl_uart3: uart3grp {
2 fsl,pins = <
3 MX6UL_PAD_UART3_TX_DATA__UART3_DCE_TX 0X1b0b1
4 MX6UL_PAD_UART3_RX_DATA__UART3_DCE_RX 0X1b0b1
5 >;
6 };
然后检查一下 UART3_TX 和 UART3_RX 这两个引脚有没有被用作其他功能,如果有的话要将其屏蔽掉,保证这两个 IO 只用作 UART3。
添 加 完 pinctrl 子 节 点 后 , 添 加 uart3 节 点 , 仍 然 是 在 topeet_emmc_4_3.dts 文 件 中 , 在topeet_emmc_4_3.dts 文件中已经默认存在了 uart1 和 uart2 两个节点了,如图 53.4.1.1 所示:
<ignore_js_op>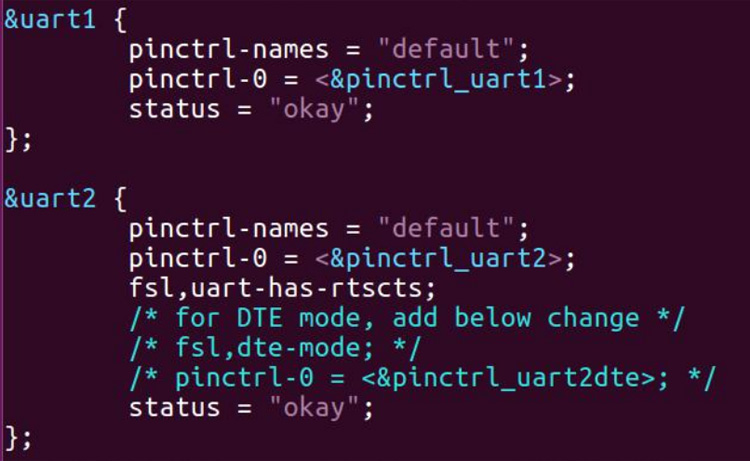
因为没有用到 uart2,并且 uart2 的引脚节点中用到了 uart3 的 IO,所以需要将 uart2 注释或删掉。然后添加 uart3 节点,内容如下:
1 &uart3 {
2 pinctrl-names = "default";
3 pinctrl-0 = <&pinctrl_uart3>;
4 status = "okay";
5 };
添加完成后,重新编译设备树文件,然后使用新的设备树文件启动 Linux 系统。系统启动以后就会生成一个名为“/dev/ttymxc2”的设备文件,ttymxc2 就是 UART3 对应的设备文件,应用程序可以通过访问ttymxc2 来实现对 UART3 的操作。
53.5 RS232 驱动测试
53.5.1 编写应用测试程序
本实验例程路径:i.MX6UL 终结者光盘资料/06_Linux 驱动例程/19_uart
创建 uart_test.c 应用测试程序,具体内容如下:
1 #include
2 #include
3 #include
4 #include
5 #include
6 #include
7 #include
8 #include
9 #include
10
11 int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop)
12 {
13 struct termios newtio,oldtio;
14 if ( tcgetattr( fd,&oldtio) != 0) {
15 perror("SetupSerial 1");
16 return -1;
17 }
18 bzero( &newtio, sizeof( newtio ) );
19 newtio.c_cflag |= CLOCAL | CREAD;
20 newtio.c_cflag &= ~CSIZE;
21
22 switch( nBits )
23 {
24 case 7:
25 newtio.c_cflag |= CS7;
26 break;
27 case 8:
28 newtio.c_cflag |= CS8;
29 break;
30 }
31
32 switch( nEvent )
33 {
34 case 'O':
35 newtio.c_cflag |= PARENB;
36 newtio.c_cflag |= PARODD;
37 newtio.c_iflag |= (INPCK | ISTRIP);
38 break;
39 case 'E':
40 newtio.c_iflag |= (INPCK | ISTRIP);
41 newtio.c_cflag |= PARENB;
42 newtio.c_cflag &= ~PARODD;
43 break;
44 case 'N':
45 newtio.c_cflag &= ~PARENB;
46 break;
47 }
48
49 switch( nSpeed )
50 {
51 case 2400:
52 cfsetispeed(&newtio, B2400);
53 cfsetospeed(&newtio, B2400);
54 break;
55 case 4800:
56 cfsetispeed(&newtio, B4800);
57 cfsetospeed(&newtio, B4800);
58 break;
59 case 9600:
60 cfsetispeed(&newtio, B9600);
61 cfsetospeed(&newtio, B9600);
62 break;
63 case 115200:
64 cfsetispeed(&newtio, B115200);
65 cfsetospeed(&newtio, B115200);
66 break;
67 case 460800:
68 cfsetispeed(&newtio, B460800);
69 cfsetospeed(&newtio, B460800);
70 break;
71 default:
72 cfsetispeed(&newtio, B9600);
73 cfsetospeed(&newtio, B9600);
74 break;
75 }
76 if( nStop == 1 )
77 newtio.c_cflag &= ~CSTOPB;
78 else if ( nStop == 2 )
79 newtio.c_cflag |= CSTOPB;
80 newtio.c_cc[VTIME] = 0;
81 newtio.c_cc[VMIN] = 0;
82 tcflush(fd,TCIFLUSH);
83 if((tcsetattr(fd,TCSANOW,&newtio))!=0)
84 {
85 perror("com set error");
86 return -1;
87 }
88
89 // printf("set done!
");
90 return 0;
91 }
92 int main(int argc , char **argv)
93 {
94 int fd,wr_static,ret,nread,count=0;
95 char *buffer = "hello world!
";
96 char buff[8];
97 int i;
98
99 if(argc < 3)
100 printf("Usage ...");
101
102 printf("
uart__test start
");
103
104 char *uart = argv[1];
105
106 if((fd = open(uart, O_RDWR|O_NOCTTY|O_NDELAY))<0){
107 printf("open %s is failed",uart);
108 }
109 else {
110 printf("open %s is success
",uart);
111 set_opt(fd, 115200, 8, 'N', 1);
112 }
113
114 if(atoi(argv[2]) == 0)
115 {
116 while(1){
117 if (ret == 0)
118 printf("write time out
");
119 else{
120 ret = write(fd,buffer, strlen(buffer));
121 sleep(1);
122 }
123 }
124 }
125
126 else if(atoi(argv[2]) == 1)
127 {
128 memset(buff,0,8);
129 while(1){
130 while((nread = read(fd,buff,8))>0){
131 //count+=nread;
132 //printf("count = %d
",count);
133 printf("read: ");
134 for(i = 0; buff != 0; i++)
135 printf("%c",buff);
136 printf("
");
137 memset(buff,0,8);
138 }
139 }
140 }
141
142 close(fd);
143 return 0;
144 }
第 11~91 行,用于设置串口的波特率。
第 92 行,main 函数需要两个参数,第一个参数是串口的设备节点文件,比如/dev/ttymxc2,第二个参数选择读写数据,0:写数据,1:读数据。
第 111 行,当打开串口设备文件成功时,设置串口参数为:115200/8/N/1。用户可以根据实际情况修改。
第 114~124 行,当指令为写数据时执行。使用 sleep 函数延时,1s 发一次数据。
第 126~140 行,当指令为读数据时执行。
53.5.2 运行测试
首先使用下面的命令编译应用测试程序:
arm-linux-gnueabihf-gcc -o uart_test uart_test.c
编译成功,得到 uart_test 应用程序。
然后开始测试 RS232 功能,因为 RS232 是 TTL 电平所以需要 USB 转 TTL 电平设备,然后连接开发板上的 uart3 引脚,在电脑打开 USB 转 TTL 电平设备的终端,如图 53.5.2.1 所示:
<ignore_js_op>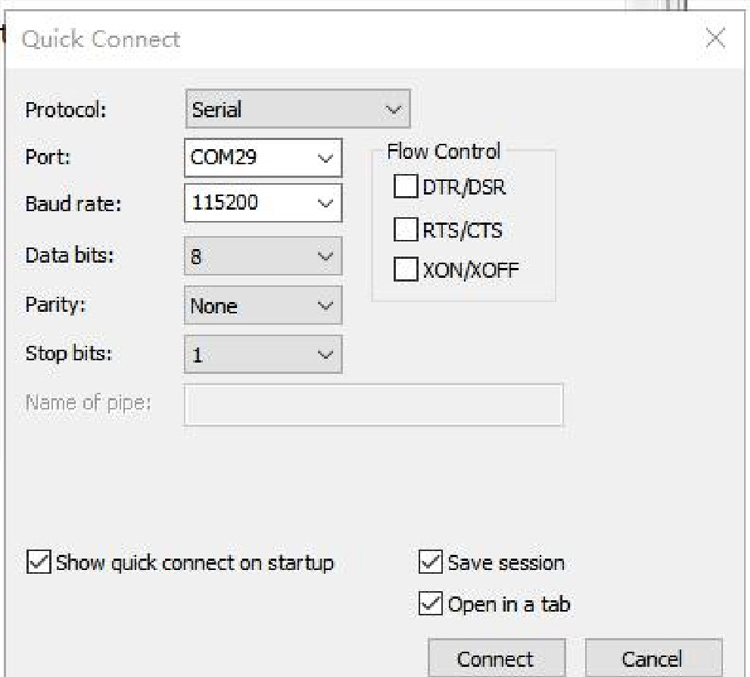
选择正确的 port 端口,应用程序中默认波特率为 115200,所以设置波特率为 115200,然后连接设备。
拷贝编译好的 uart_test 应用测试程序到开发板中,执行下面命令进行写数据实现:
./uart_test /dev/ttymxc2 0 &
运行结果如图 53.5.2.2 所示:
<ignore_js_op>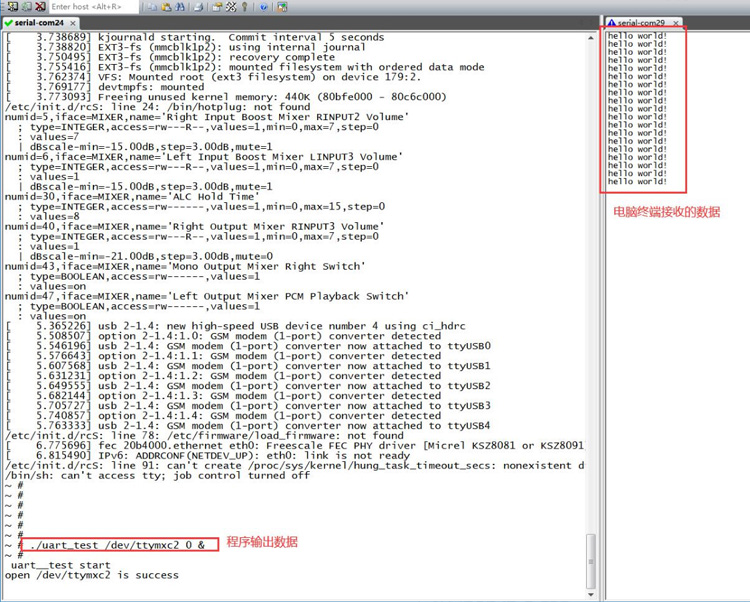
使用下面的命令进行读数据:
./uart_test /dev/ttymxc2 1 &
运行结果如图 53.5.2.3 所示:
<ignore_js_op>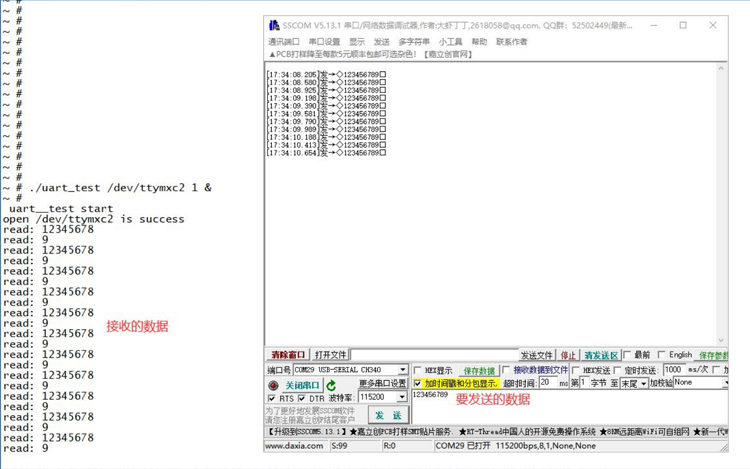
应用程序每次接受 8 个字节的数据,可以看出运行正常。
53.6 RS485 测试
其实 RS485 测试和 RS232 测试流程一样,只不过接口不一样,需要使用 USB 转 485 设备。应用测试程序也是一样的。在这里就不重复测试了,用户可以自己试验一下。
<ignore_js_op>
<ignore_js_op>