https://zhuanlan.zhihu.com/p/42940310
参考资料
[1]视频监控中运动物体检测与跟踪----相邻帧差法和三帧差法 - CSDN博客
https://blog.csdn.net/dcrmg/article/details/52234929[2]运动目标检测--帧间差分法 - CSDN博客
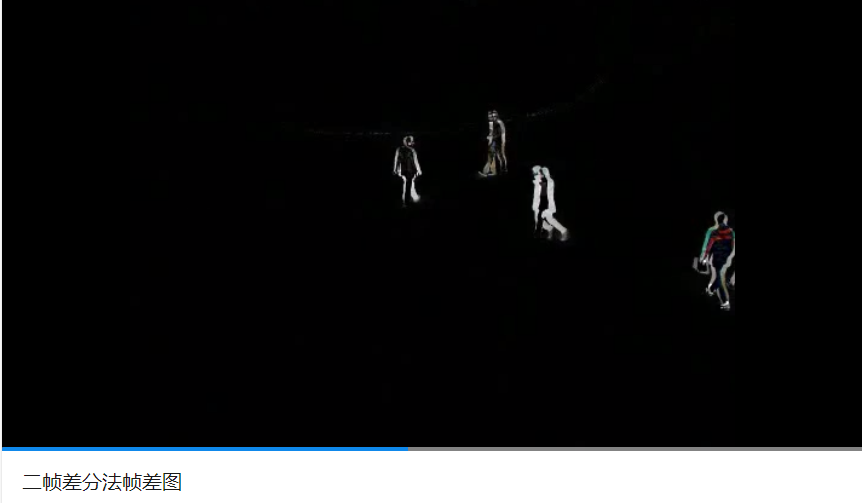
https://blog.csdn.net/tiemaxiaosu/article/details/51558830帧差法依据的原则是:当视频中存在移动物体的时候,相邻帧(或相邻三帧)之间在灰度上会有差别,求取两帧图像灰度差的绝对值,则静止的物体在差值图像上表现出来全是0,而移动物体特别是移动物体的轮廓处由于存在灰度变化为非0,当绝对值超过一定阈值时,即可判断为运动目标,从而实现目标的检测功能。 帧间差分法的优点是算法实现简单,程序设计复杂度低;对光线等场景变化不太敏感,能够适应各种动态环境,有着比较强的鲁棒性。缺点是不能提取出对象的完整区域,对象内部有“空洞”,只能提取出边界,边界轮廓比较粗,往往比实际物体要大。对快速运动的物体,容易出现鬼影的现象,甚至会被检测为两个不同的运动物体,对慢速运动的物体,当物体在前后两帧中几乎完全重叠时,则检测不到物体。故该方法一般适用于简单的实时运动检测的情况。 这里介绍二帧法和三帧法的实现。
2. 相邻帧间差分法
相邻帧间差分法直接对相邻的两帧图像做差分运算,并取差分运算的绝对值构成移动物体,优点是运算快速,实时性高,缺点是无法应对光照的突变,物体间一般具有空洞。
代码实现如下:
# 导入必要的软件包
import cv2
# 视频文件输入初始化
filename = "E:/opencv_vs/opencv/sources/samples/data/vtest.avi"
camera = cv2.VideoCapture(filename)
# 视频文件输出参数设置
out_fps = 12.0 # 输出文件的帧率
fourcc = cv2.VideoWriter_fourcc('M', 'P', '4', '2')
out1 = cv2.VideoWriter('E:/video/v1.avi', fourcc, out_fps, (500, 400))
out2 = cv2.VideoWriter('E:/video/v2.avi', fourcc, out_fps, (500, 400))
# 初始化当前帧的前帧
lastFrame = None
# 遍历视频的每一帧
while camera.isOpened():
# 读取下一帧
(ret, frame) = camera.read()
# 如果不能抓取到一帧,说明我们到了视频的结尾
if not ret:
break
# 调整该帧的大小
frame = cv2.resize(frame, (500, 400), interpolation=cv2.INTER_CUBIC)
# 如果第一帧是None,对其进行初始化
if lastFrame is None:
lastFrame = frame
continue
# 计算当前帧和前帧的不同
frameDelta = cv2.absdiff(lastFrame, frame)
# 当前帧设置为下一帧的前帧
lastFrame = frame.copy()
# 结果转为灰度图
thresh = cv2.cvtColor(frameDelta, cv2.COLOR_BGR2GRAY)
# 图像二值化
thresh = cv2.threshold(thresh, 25, 255, cv2.THRESH_BINARY)[1]
'''
#去除图像噪声,先腐蚀再膨胀(形态学开运算)
thresh=cv2.erode(thresh,None,iterations=1)
thresh = cv2.dilate(thresh, None, iterations=2)
'''
# 阀值图像上的轮廓位置
binary, cnts, hierarchy = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 遍历轮廓
for c in cnts:
# 忽略小轮廓,排除误差
if cv2.contourArea(c) < 300:
continue
# 计算轮廓的边界框,在当前帧中画出该框
(x, y, w, h) = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 显示当前帧
cv2.imshow("frame", frame)
cv2.imshow("frameDelta", frameDelta)
cv2.imshow("thresh", thresh)
# 保存视频
out1.write(frame)
out2.write(frameDelta)
# 如果q键被按下,跳出循环
if cv2.waitKey(200) & 0xFF == ord('q'):
break
# 清理资源并关闭打开的窗口
out1.release()
out2.release()
camera.release()
cv2.destroyAllWindows()
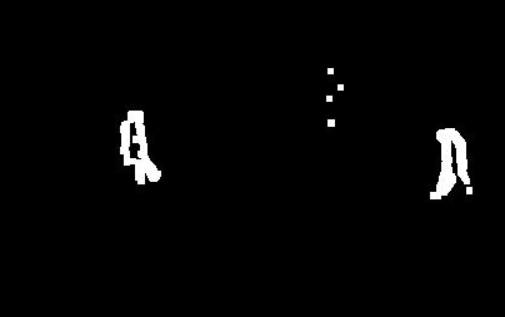
二帧差分法二值化图1
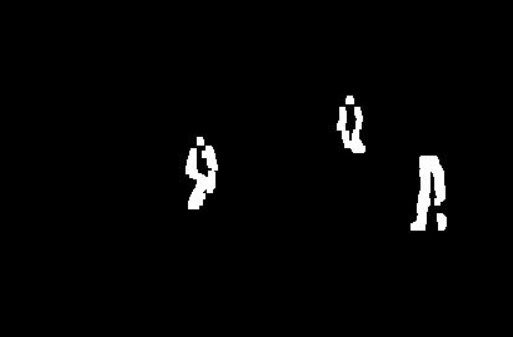
二帧差分法二值化图2

2. 三帧差分法
三帧差法是在相邻帧差法基础上改进的算法,在一定程度上优化了运动物体双边,粗轮廓的现象,相比之下,三帧差法比相邻帧差法更适用于物体移动速度较快的情况,比如道路上车辆的智能监控。
三帧差法基本实现步骤如下:首先前两帧图像做灰度差,然后当前帧图像与前一帧图像做灰度差,最后1和2的结果图像按位做“与”操作,进行阙值判断和得出运动目标。
代码实现如下:
# 导入必要的软件包
import cv2
# 视频文件输入初始化
filename = "E:/opencv_vs/opencv/sources/samples/data/vtest.avi"
camera = cv2.VideoCapture(filename)
# 视频文件输出参数设置
out_fps = 12.0 # 输出文件的帧率
fourcc = cv2.VideoWriter_fourcc('M', 'P', '4', '2')
out1 = cv2.VideoWriter('E:/video/v3.avi', fourcc, out_fps, (500, 400))
out2 = cv2.VideoWriter('E:/video/v4.avi', fourcc, out_fps, (500, 400))
# 初始化当前帧的前两帧
lastFrame1 = None
lastFrame2 = None
# 遍历视频的每一帧
while camera.isOpened():
# 读取下一帧
(ret, frame) = camera.read()
# 如果不能抓取到一帧,说明我们到了视频的结尾
if not ret:
break
# 调整该帧的大小
frame = cv2.resize(frame, (500, 400), interpolation=cv2.INTER_CUBIC)
# 如果第一二帧是None,对其进行初始化,计算第一二帧的不同
if lastFrame2 is None:
if lastFrame1 is None:
lastFrame1 = frame
else:
lastFrame2 = frame
global frameDelta1 # 全局变量
frameDelta1 = cv2.absdiff(lastFrame1, lastFrame2) # 帧差一
continue
# 计算当前帧和前帧的不同,计算三帧差分
frameDelta2 = cv2.absdiff(lastFrame2, frame) # 帧差二
thresh = cv2.bitwise_and(frameDelta1, frameDelta2) # 图像与运算
thresh2 = thresh.copy()
# 当前帧设为下一帧的前帧,前帧设为下一帧的前前帧,帧差二设为帧差一
lastFrame1 = lastFrame2
lastFrame2 = frame.copy()
frameDelta1 = frameDelta2
# 结果转为灰度图
thresh = cv2.cvtColor(thresh, cv2.COLOR_BGR2GRAY)
# 图像二值化
thresh = cv2.threshold(thresh, 25, 255, cv2.THRESH_BINARY)[1]
# 去除图像噪声,先腐蚀再膨胀(形态学开运算)
thresh = cv2.dilate(thresh, None, iterations=3)
thresh = cv2.erode(thresh, None, iterations=1)
# 阀值图像上的轮廓位置
binary, cnts, hierarchy = cv2.findContours(thresh.copy(), cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)
# 遍历轮廓
for c in cnts:
# 忽略小轮廓,排除误差
if cv2.contourArea(c) < 300:
continue
# 计算轮廓的边界框,在当前帧中画出该框
(x, y, w, h) = cv2.boundingRect(c)
cv2.rectangle(frame, (x, y), (x + w, y + h), (0, 255, 0), 2)
# 显示当前帧
cv2.imshow("frame", frame)
cv2.imshow("thresh", thresh)
cv2.imshow("threst2", thresh2)
# 保存视频
out1.write(frame)
out2.write(thresh2)
# 如果q键被按下,跳出循环
if cv2.waitKey(200) & 0xFF == ord('q'):
break
# 清理资源并关闭打开的窗口
out1.release()
out2.release()
camera.release()
cv2.destroyAllWindows()
