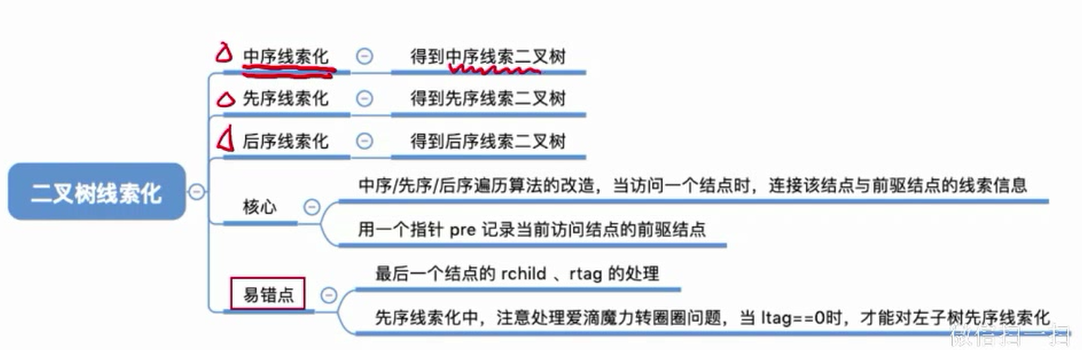
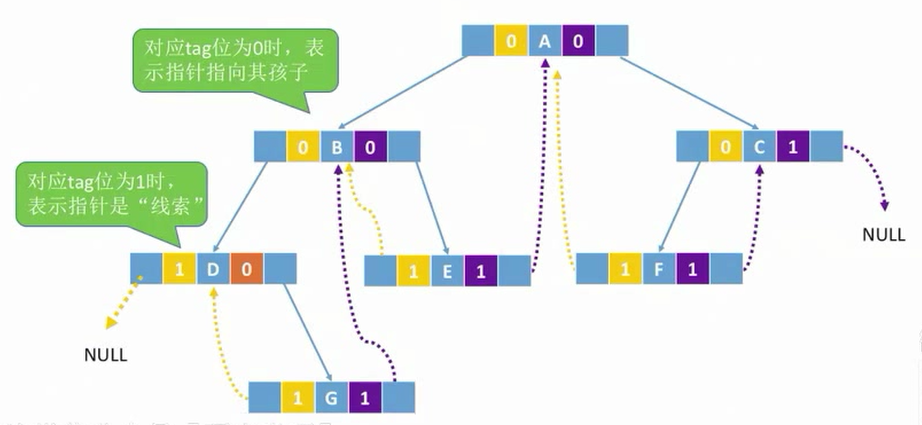
二叉树的线索化
线索二叉树:
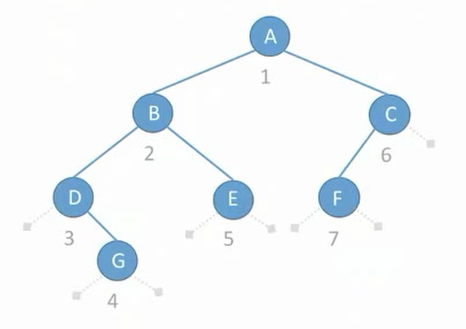
- 中序线索化 左中右
- 先序线索化 中左右
- 后序线索化 左右中
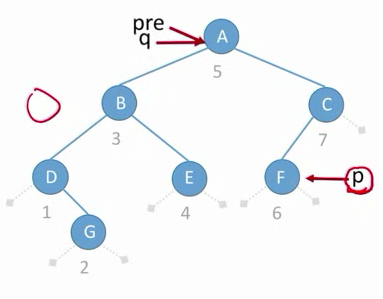
用土办法找到中序前驱
//中序遍历
void findPre(BiTree T){
if(T!=NULL){
findPre(T->lchild); //递归遍历左子树
visit(T);//访问根节点
findPre(T->rchild);//递归遍历右子树
}
}
//访问结点q
void visit(BiTNode *q){
if(q==p){ //当前访问结点刚好是系结点
final = pre; //找到p的前驱
}else{
pre = q; //pre指向当前访问的结点
}
}
//辅助全局变量,用于查找结点p的前驱
BiTNode *p; //p指向目标结点
BiTNode * pre = NULL;//指向当前访问的结点
BiTNod * final = NULL;//用于记录最终结点
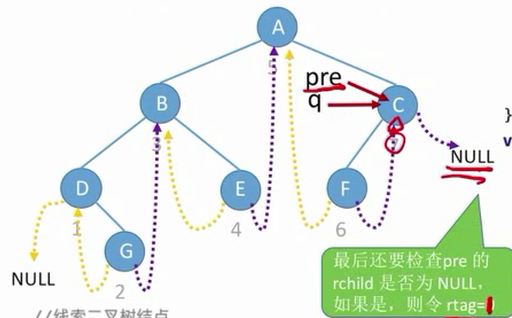
中序线索化
左中右

//全局变量pre,指向当前访问结点的前驱
ThreadNode *pre=NULL;
void CreateInThread(ThreadTree T){
pre = NULL; //pre初始值为NULL
if(T!=NULL){ //非空的二叉树才能线索化
InThread(T); //中序线索化二叉树
if(pre->rchild==NULL){
pre->rtag=1; //处理遍历的最后一个结点
}
}
}
//线索二叉树结点
typedef struct ThreadNode{
ElemTyoe data;
struct ThreadNode *lchild,*rchild;
int ltag,rtag;//左、右线索标志
}ThreadNode,*ThtreadTree;
//中序遍历二叉树,一边遍历一遍线索化
void InThread(ThreadTree T){
if(T!=NULL){
InThread(T->lchild);
visit(T);
InThread(T->rchild);
}
}
void visit(ThreadNode *q){
if(q->lchild==NULL){//左子树为空,建立前驱线索
q->lchild=pre;
q->ltag=1;//修改ltag,线索
}
if(pre!=NULL&&pre->rchild==NULL){
pre->rchild=q;//建立前驱结点的后继线索
pre->rtag=1;
}
pre=q;
}
先序线索化
中左右
注意:做了前驱线索,小心遍历的时候无限转圈圈。
//全局变量pre,指向当前访问结点的前驱
ThreadNode *pre=NULL;
//先序线索化二叉树T
void CreatePreThread(ThreadTree T){
pre = NULL;
if(T!=NULL){
PreThread(T);
if(pre->rchild == NULL){
pre->rtag = 1;
}
}
}
//先序遍历二叉树,一边遍历一边线索化
void PreThread(ThreadTree T){
visit(T); //先处理根节点
if(T->ltag == 0){ //lchild不是前驱线索,提防无限转圈
PreThread(T->lchild);
}
PreThread(T->rchild);
}
void visit(ThreadNode *q){
if(q->lchild==NULL){ //左子树为空,建立前驱线索
q->lchild = pre;
q->ltag = 1;
}
if(pre!=NULL&&pre->rchild==NULL){
pre->rchild = q; //建立前驱结点的后继线索
pre->rtag = 1;
}
pre = q;
}
后序线索化
左右中
//全局变量pre,指向当前访问结点的前驱
ThreadNode *pre=NULL;
//先序线索化二叉树T
void CreatePreThread(ThreadTree T){
pre = NULL;
if(T!=NULL){
PreThread(T);
if(pre->rchild == NULL){
pre->rtag = 1;
}
}
}
//后序遍历二叉树,一边遍历一边线索化
void PostThread(ThreadTree T){
PostThread(T->lchild);
PostThread(T->rchild);
visit(T); //最后处理根节点
}
void visit(ThreadNode *q){
if(q->lchild==NULL){ //左子树为空,建立前驱线索
q->lchild = pre;
q->ltag = 1;
}
if(pre!=NULL&&pre->rchild==NULL){
pre->rchild = q; //建立前驱结点的后继线索
pre->rtag = 1;
}
pre = q;
}
总结