摘要:图像超分即超分辨率,将图像从模糊的状态变清晰。
本文分享自华为云社区《图像超分实验:SRCNN/FSRCNN》,作者:zstar。
图像超分即超分辨率,将图像从模糊的状态变清晰。本文对BSDS500数据集进行超分实验。
1.实验目标
输入大小为h×w的图像X,输出为一个sh×sw的图像 Y,s为放大倍数。
2.数据集简介
本次实验采用的是 BSDS500 数据集,其中训练集包含 200 张图像,验证集包含 100 张图像,测试集包含 200 张图像。
数据集来源:https://download.csdn.net/download/weixin_42028424/11045313
3.数据预处理
数据预处理包含两个步骤:
(1)将图片转换成YCbCr模式
由于RGB颜色模式色调、色度、饱和度三者混在一起难以分开,因此将其转换成 YcbCr 颜色模式,Y是指亮度分量,Cb表示 RGB输入信号蓝色部分与 RGB 信号亮度值之间的差异,Cr 表示 RGB 输入信号红色部分与 RGB 信号亮度值之间的差异。
(2)将图片裁剪成 300×300 的正方形
由于后面采用的神经网路输入图片要求长宽一致,而 BSDS500 数据集中的图片长宽并不一致,因此需要对其进行裁剪。这里采用的方式是先定位到每个图片中心,然后以图片中心为基准,向四个方向拓展 150 个像素,从而将图片裁剪成 300×300 的正方形。
相关代码:
def is_image_file(filename): return any(filename.endswith(extension) for extension in [".png", ".jpg", ".jpeg"]) def load_img(filepath): img = Image.open(filepath).convert('YCbCr') y, _, _ = img.split() return y CROP_SIZE = 300 class DatasetFromFolder(Dataset): def __init__(self, image_dir, zoom_factor): super(DatasetFromFolder, self).__init__() self.image_filenames = [join(image_dir, x) for x in listdir(image_dir) if is_image_file(x)] crop_size = CROP_SIZE - (CROP_SIZE % zoom_factor) # 从图片中心裁剪成300*300 self.input_transform = transforms.Compose([transforms.CenterCrop(crop_size), transforms.Resize( crop_size // zoom_factor), transforms.Resize( crop_size, interpolation=Image.BICUBIC), # BICUBIC 双三次插值 transforms.ToTensor()]) self.target_transform = transforms.Compose( [transforms.CenterCrop(crop_size), transforms.ToTensor()]) def __getitem__(self, index): input = load_img(self.image_filenames[index]) target = input.copy() input = self.input_transform(input) target = self.target_transform(target) return input, target def __len__(self): return len(self.image_filenames)
4.网络结构
本次实验尝试了SRCNN和FSRCNN两个网络。
4.1 SRCNN
SRCNN 由 2014 年 Chao Dong 等人提出,是深度学习在图像超分领域的开篇之作。其网络结构如下图所示:
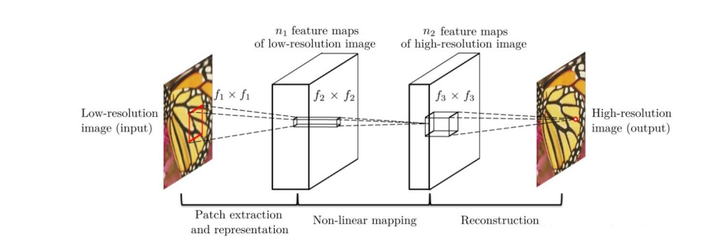
该网络对于一个低分辨率图像,先使用双三次插值将其放大到目标大小,再通过三层卷积网络做非线性映射,得到的结果作为高分辨率图像输出。
作者对于这三层卷积层的解释:
(1)特征块提取和表示:此操作从低分辨率图像Y中提取重叠特征块,并将每个特征块表示为一个高维向量。这些向量包括一组特征图,其数量等于向量的维数。
(2)非线性映射:该操作将每个高维向量非线性映射到另一个高维向量。每个映射向量在概念上都是高分辨率特征块的表示。这些向量同样包括另一组特征图。
(3)重建:该操作聚合上述高分辨率patch-wise(介于像素级别和图像级别的区域)表示,生成最终的高分辨率图像。
各层结构:
- 输入:处理后的低分辨率图像
- 卷积层 1:采用 9×9 的卷积核
- 卷积层 2:采用 1×1 的卷积核
- 卷积层 3:采用 5×5 的卷积核
- 输出:高分辨率图像
模型结构代码:
class SRCNN(nn.Module): def __init__(self, upscale_factor): super(SRCNN, self).__init__() self.relu = nn.ReLU() self.conv1 = nn.Conv2d(1, 64, kernel_size=5, stride=1, padding=2) self.conv2 = nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1) self.conv3 = nn.Conv2d(64, 32, kernel_size=3, stride=1, padding=1) self.conv4 = nn.Conv2d(32, upscale_factor ** 2, kernel_size=3, stride=1, padding=1) self.pixel_shuffle = nn.PixelShuffle(upscale_factor) self._initialize_weights() def _initialize_weights(self): init.orthogonal_(self.conv1.weight, init.calculate_gain('relu')) init.orthogonal_(self.conv2.weight, init.calculate_gain('relu')) init.orthogonal_(self.conv3.weight, init.calculate_gain('relu')) init.orthogonal_(self.conv4.weight) def forward(self, x): x = self.conv1(x) x = self.relu(x) x = self.conv2(x) x = self.relu(x) x = self.conv3(x) x = self.relu(x) x = self.conv4(x) x = self.pixel_shuffle(x) return x
4.2 FSRCNN
FSRCNN 由 2016 年 Chao Dong 等人提出,与 SRCNN 是相同作者。其网络结构如下图所示:
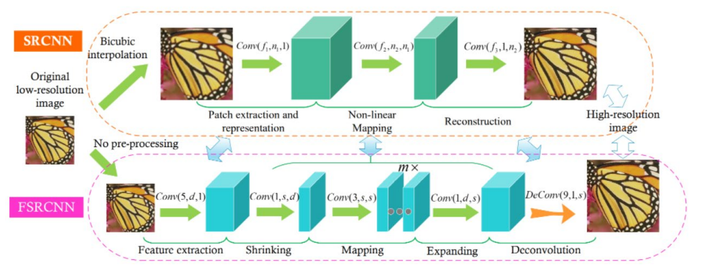
FSRCNN在SRCNN基础上做了如下改变:
1.FSRCNN直接采用低分辨的图像作为输入,不同于SRCNN需要先对低分辨率的图像进行双三次插值然后作为输入;
2.FSRCNN在网络的最后采用反卷积层实现上采样;
3.FSRCNN中没有非线性映射,相应地出现了收缩、映射和扩展;
4.FSRCNN选择更小尺寸的滤波器和更深的网络结构。
各层结构:
- 输入层:FSRCNN不使用bicubic插值来对输入图像做上采样,它直接进入特征提取层
- 特征提取层:采用1 × d × ( 5 × 5 )的卷积层提取
- 收缩层:采用d × s × ( 1 × 1 ) 的卷积层去减少通道数,来减少模型复杂度
- 映射层:采用s × s × ( 3 × 3 ) 卷积层去增加模型非线性度来实现LR → SR 的映射
- 扩张层:该层和收缩层是对称的,采用s × d × ( 1 × 1 ) 卷积层去增加重建的表现力
- 反卷积层:s × 1 × ( 9 × 9 )
- 输出层:输出HR图像
模型结构代码:
class FSRCNN(nn.Module): def __init__(self, scale_factor, num_channels=1, d=56, s=12, m=4): super(FSRCNN, self).__init__() self.first_part = nn.Sequential( nn.Conv2d(num_channels, d, kernel_size=5, padding=5//2), nn.PReLU(d) ) self.mid_part = [nn.Conv2d(d, s, kernel_size=1), nn.PReLU(s)] for _ in range(m): self.mid_part.extend([nn.Conv2d(s, s, kernel_size=3, padding=3//2), nn.PReLU(s)]) self.mid_part.extend([nn.Conv2d(s, d, kernel_size=1), nn.PReLU(d)]) self.mid_part = nn.Sequential(*self.mid_part) self.last_part = nn.ConvTranspose2d(d, num_channels, kernel_size=9, stride=scale_factor, padding=9//2, output_padding=scale_factor-1) self._initialize_weights() def _initialize_weights(self): for m in self.first_part: if isinstance(m, nn.Conv2d): nn.init.normal_(m.weight.data, mean=0.0, std=math.sqrt(2/(m.out_channels*m.weight.data[0][0].numel()))) nn.init.zeros_(m.bias.data) for m in self.mid_part: if isinstance(m, nn.Conv2d): nn.init.normal_(m.weight.data, mean=0.0, std=math.sqrt(2/(m.out_channels*m.weight.data[0][0].numel()))) nn.init.zeros_(m.bias.data) nn.init.normal_(self.last_part.weight.data, mean=0.0, std=0.001) nn.init.zeros_(self.last_part.bias.data) def forward(self, x): x = self.first_part(x) x = self.mid_part(x) x = self.last_part(x) return x
5.评估指标
本次实验尝试了 PSNR 和 SSIM 两个指标。
5.1 PSNR
PSNR(Peak Signal to Noise Ratio)为峰值信噪比,计算公式如下:
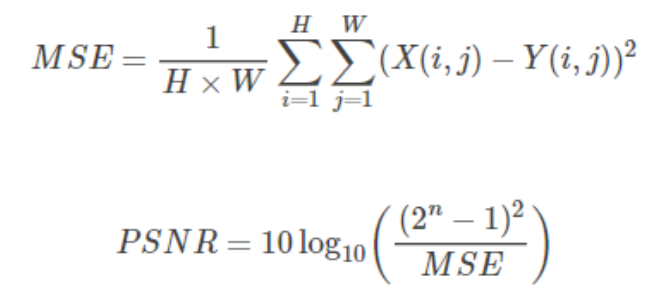
其中,n为每像素的比特数。
PSNR 的单位是dB,数值越大表示失真越小,一般认为 PSNR 在 38 以上的时候,人眼就无法区分两幅图片了。
相关代码:
def psnr(loss): return 10 * log10(1 / loss.item())
5.2 SSIM
SSIM(Structural Similarity)为结构相似性,由三个对比模块组成:亮度、对比度、结构。
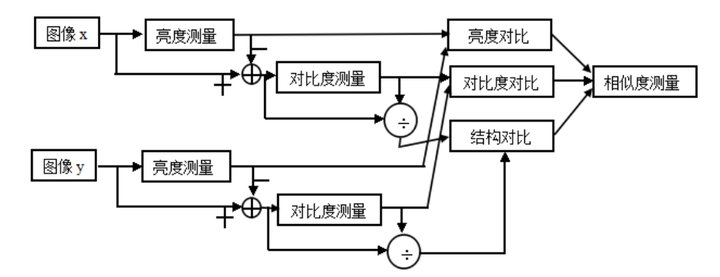
亮度对比函数
图像的平均灰度计算公式:

亮度对比函数计算公式:
对比度对比函数
图像的标准差计算公式:

对比度对比函数计算公式:

结构对比函数
结构对比函数计算公式:
综合上述三个部分,得到 SSIM 计算公式:

其中,\alphaα,\betaβ,\gammaγ > 0,用来调整这三个模块的重要性。
SSIM 函数的值域为[0, 1], 值越大说明图像失真越小,两幅图像越相似。
相关代码:
由于pytorch没有类似tensorflow类似tf.image.ssim这样计算SSIM的接口,因此根据公式进行自定义函数用来计算
""" 计算ssim函数 """ # 计算一维的高斯分布向量 def gaussian(window_size, sigma): gauss = torch.Tensor( [exp(-(x - window_size//2)**2/float(2*sigma**2)) for x in range(window_size)]) return gauss/gauss.sum() # 创建高斯核,通过两个一维高斯分布向量进行矩阵乘法得到 # 可以设定channel参数拓展为3通道 def create_window(window_size, channel=1): _1D_window = gaussian(window_size, 1.5).unsqueeze(1) _2D_window = _1D_window.mm( _1D_window.t()).float().unsqueeze(0).unsqueeze(0) window = _2D_window.expand( channel, 1, window_size, window_size).contiguous() return window # 计算SSIM # 直接使用SSIM的公式,但是在计算均值时,不是直接求像素平均值,而是采用归一化的高斯核卷积来代替。 # 在计算方差和协方差时用到了公式Var(X)=E[X^2]-E[X]^2, cov(X,Y)=E[XY]-E[X]E[Y]. def ssim(img1, img2, window_size=11, window=None, size_average=True, full=False, val_range=None): # Value range can be different from 255. Other common ranges are 1 (sigmoid) and 2 (tanh). if val_range is None: if torch.max(img1) > 128: max_val = 255 else: max_val = 1 if torch.min(img1) < -0.5: min_val = -1 else: min_val = 0 L = max_val - min_val else: L = val_range padd = 0 (_, channel, height, width) = img1.size() if window is None: real_size = min(window_size, height, width) window = create_window(real_size, channel=channel).to(img1.device) mu1 = F.conv2d(img1, window, padding=padd, groups=channel) mu2 = F.conv2d(img2, window, padding=padd, groups=channel) mu1_sq = mu1.pow(2) mu2_sq = mu2.pow(2) mu1_mu2 = mu1 * mu2 sigma1_sq = F.conv2d(img1 * img1, window, padding=padd, groups=channel) - mu1_sq sigma2_sq = F.conv2d(img2 * img2, window, padding=padd, groups=channel) - mu2_sq sigma12 = F.conv2d(img1 * img2, window, padding=padd, groups=channel) - mu1_mu2 C1 = (0.01 * L) ** 2 C2 = (0.03 * L) ** 2 v1 = 2.0 * sigma12 + C2 v2 = sigma1_sq + sigma2_sq + C2 cs = torch.mean(v1 / v2) # contrast sensitivity ssim_map = ((2 * mu1_mu2 + C1) * v1) / ((mu1_sq + mu2_sq + C1) * v2) if size_average: ret = ssim_map.mean() else: ret = ssim_map.mean(1).mean(1).mean(1) if full: return ret, cs return ret class SSIM(torch.nn.Module): def __init__(self, window_size=11, size_average=True, val_range=None): super(SSIM, self).__init__() self.window_size = window_size self.size_average = size_average self.val_range = val_range # Assume 1 channel for SSIM self.channel = 1 self.window = create_window(window_size) def forward(self, img1, img2): (_, channel, _, _) = img1.size() if channel == self.channel and self.window.dtype == img1.dtype: window = self.window else: window = create_window(self.window_size, channel).to( img1.device).type(img1.dtype) self.window = window self.channel = channel return ssim(img1, img2, window=window, window_size=self.window_size, size_average=self.size_average)
6.模型训练/测试
设定 epoch 为 500 次,保存验证集上 PSNR 最高的模型。两个模型在测试集上的表现如下表所示:
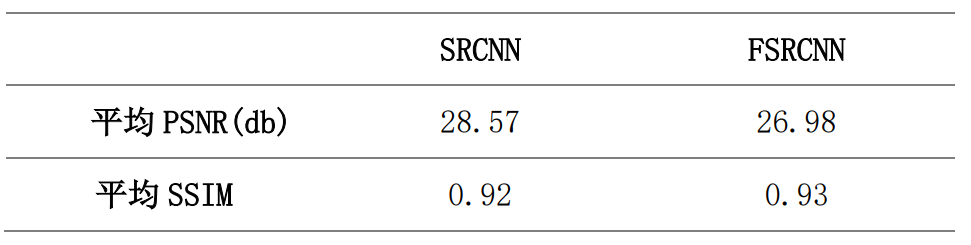
从结果可以发现,FSRCNN 的 PSNR 比 SRCNN 低,但 FSRCNN 的 SSIM 比 SRCNN 高,说明 PSNR 和 SSIM 并不存在完全正相关的关系。
训练/验证代码:
model = FSRCNN(1).to(device) criterion = nn.MSELoss() optimizer = optim.Adam(model.parameters(), lr=1e-2) scheduler = MultiStepLR(optimizer, milestones=[50, 75, 100], gamma=0.1) best_psnr = 0.0 for epoch in range(nb_epochs): # Train epoch_loss = 0 for iteration, batch in enumerate(trainloader): input, target = batch[0].to(device), batch[1].to(device) optimizer.zero_grad() out = model(input) loss = criterion(out, target) loss.backward() optimizer.step() epoch_loss += loss.item() print(f"Epoch {epoch}. Training loss: {epoch_loss / len(trainloader)}") # Val sum_psnr = 0.0 sum_ssim = 0.0 with torch.no_grad(): for batch in valloader: input, target = batch[0].to(device), batch[1].to(device) out = model(input) loss = criterion(out, target) pr = psnr(loss) sm = ssim(input, out) sum_psnr += pr sum_ssim += sm print(f"Average PSNR: {sum_psnr / len(valloader)} dB.") print(f"Average SSIM: {sum_ssim / len(valloader)} ") avg_psnr = sum_psnr / len(valloader) if avg_psnr >= best_psnr: best_psnr = avg_psnr torch.save(model, r"best_model_FSRCNN.pth") scheduler.step()
测试代码:
BATCH_SIZE = 4 model_path = "best_model_FSRCNN.pth" testset = DatasetFromFolder(r"./data/images/test", zoom_factor) testloader = DataLoader(dataset=testset, batch_size=BATCH_SIZE, shuffle=False, num_workers=NUM_WORKERS) sum_psnr = 0.0 sum_ssim = 0.0 model = torch.load(model_path).to(device) criterion = nn.MSELoss() with torch.no_grad(): for batch in testloader: input, target = batch[0].to(device), batch[1].to(device) out = model(input) loss = criterion(out, target) pr = psnr(loss) sm = ssim(input, out) sum_psnr += pr sum_ssim += sm print(f"Test Average PSNR: {sum_psnr / len(testloader)} dB") print(f"Test Average SSIM: {sum_ssim / len(testloader)} ")
7.实图测试
为了直观感受两个模型的效果,我用自己拍摄的图进行实图测试,效果如下:
s=1(放大倍数=1)
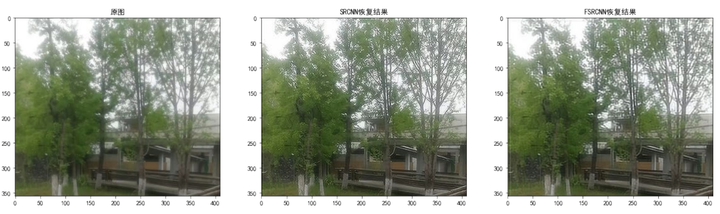
当放大倍数=1时,SRCNN的超分结果比FSRCNN的超分效果要更好一些,这和两个模型平均 PSNR 的数值相吻合。
s=2(放大倍数=2)

当放大倍数=2时,SRCNN 的超分结果和 FSRCNN 的超分效果相差不大。
相关代码:
# 参数设置 zoom_factor = 1 model = "best_model_SRCNN.pth" model2 = "best_model_FSRCNN.pth" image = "tree.png" cuda = 'store_true' device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu") # 读取图片 img = Image.open(image).convert('YCbCr') img = img.resize((int(img.size[0] * zoom_factor), int(img.size[1] * zoom_factor)), Image.BICUBIC) y, cb, cr = img.split() img_to_tensor = transforms.ToTensor() input = img_to_tensor(y).view(1, -1, y.size[1], y.size[0]).to(device) # 输出图片 model = torch.load(model).to(device) out = model(input).cpu() out_img_y = out[0].detach().numpy() out_img_y *= 255.0 out_img_y = out_img_y.clip(0, 255) out_img_y = Image.fromarray(np.uint8(out_img_y[0]), mode='L') out_img = Image.merge('YCbCr', [out_img_y, cb, cr]).convert('RGB') model2 = torch.load(model2).to(device) out2 = model2(input).cpu() out_img_y2 = out2[0].detach().numpy() out_img_y2 *= 255.0 out_img_y2 = out_img_y2.clip(0, 255) out_img_y2 = Image.fromarray(np.uint8(out_img_y2[0]), mode='L') out_img2 = Image.merge('YCbCr', [out_img_y2, cb, cr]).convert('RGB') # 绘图显示 fig, ax = plt.subplots(1, 3, figsize=(20, 20)) ax[0].imshow(img) ax[0].set_title("原图") ax[1].imshow(out_img) ax[1].set_title("SRCNN恢复结果") ax[2].imshow(out_img2) ax[2].set_title("FSRCNN恢复结果") plt.show() fig.savefig(r"tree2.png")