问题介绍:
slam构建地图,先进行降采样,再进行可视化或存储。然而经过降采样后,代码没有报错的情况下,点云数据散成一团。将代码和点云数据展示如下,
pcl::VoxelGrid<Lidar::PointType> voxel_filter; voxel_filter.setLeafSize(0.02, 0.02, 0.02); Lidar::PointCloudPtr mapPointCloud(new Lidar::PointCloudType); //滤波器输入变量 //... //往输入变量中填充数据 //... voxel_filter.setInputCloud(mapPointCloud); voxel_filter.filter(*mapPointCloud); std::cout << "after voxel_filter, mapPointCloud size : " << mapPointCloud->points.size() << std::endl; std::string index = std::to_string(ndtCount); pcl::io::savePCDFileASCII ("/home/gordon/fase_ws/src/ddd_wall_mapping/filter_map_"+index+".pcd", *mapPointCloud);
问题分析:
猜想是由于降采样滤波器的输入和输出是同一个指针变量,在处理过程中内存混乱,导致点云数据出错。
解决方案:
使用两个不同的变量作为降采样滤波器的输入和输出,并且作为输出的变量每次都要进行清空操作。
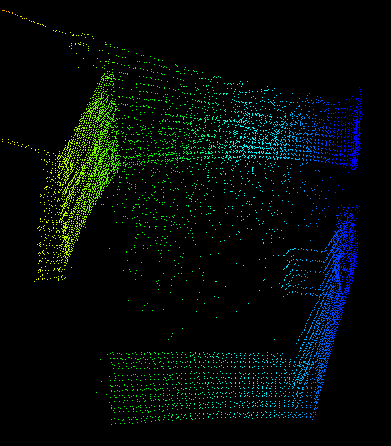
问题解决后的代码和点云数据展示如下,
pcl::VoxelGrid<Lidar::PointType> voxel_filter; voxel_filter.setLeafSize(0.02, 0.02, 0.02); Lidar::PointCloudPtr mapPointCloud(new Lidar::PointCloudType); //滤波器输入变量 //... //往输入变量中填充数据 //... Lidar::PointCloudPtr filter_mapPointCloud(new Lidar::PointCloudType); // 滤波器输出变量 voxel_filter.setInputCloud(mapPointCloud); voxel_filter.filter(*filter_mapPointCloud); mapPointCloud->clear(); *mapPointCloud += *filter_mapPointCloud; std::cout << "after voxel_filter, mapPointCloud size : " << mapPointCloud->points.size() << std::endl; std::string index = std::to_string(ndtCount); pcl::io::savePCDFileASCII ("/home/gordon/fase_ws/src/ddd_wall_mapping/filter_map_"+index+".pcd", *mapPointCloud);

至于具体原因,至今不详,忘高手或前辈指点迷津。