- 最近正在学习trajectory optimization,对于无人机系统的轨迹优化,思路都比较清晰了:
- minimum snap--闭式解或二次规划OOQP
- 基于硬约束的轨迹优化(走廊)--二次规划,NLopt, Moesk
- 基于软约束的轨迹优化--二次规划,NLopt
- 对于无人车,近期看了李柏的《智能网联汽车协同决策与规划技术》:
- 建立最优控制问题,生成安全隧道,非线性规划,内点法IPM,求解器为Ipopt
- 晚上看到了一篇论文,非常不错,正好可以学习一下无人车的轨迹优化具体是怎么实现的:
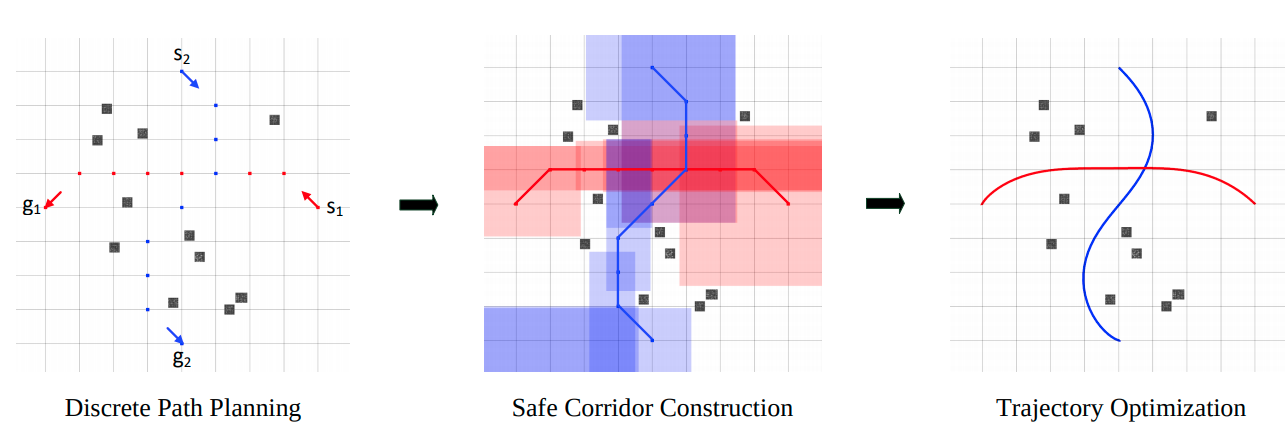
《Efficient Trajectory Planning for Multiple Non-holonomic Mobile Robots via Prioritized Trajectory Optimization》
文章也生成了走廊,轨迹优化求解采用Ipopt,并且也用到了cbs和ecbs,非常指的研读。
https://github.com/LIJUNCHENG001/multi_robot_traj_planner
总的来说,无人机,可以形成二次规划,凸优化求解器求解,无人车,NLP问题,用内点法求解器Ipopt。
- 需要掌握三块内容:
- 走廊的生成要掌握,目前已经有刘思康无人机的走廊,李柏的无人车的走廊,本文的走廊,港科大的无人车走廊,高飞的无人机的走廊。
- 掌握建模的方法,即无人机模型的书写,无人车模型的书写,形成优化命题(c++)
- Nlopt、OOQP的使用(无人机),Ipopt(无人车)的使用。