在之前的测验中,我们设计了一个成本函数,高速公路上到达一个目标选择一条车道。

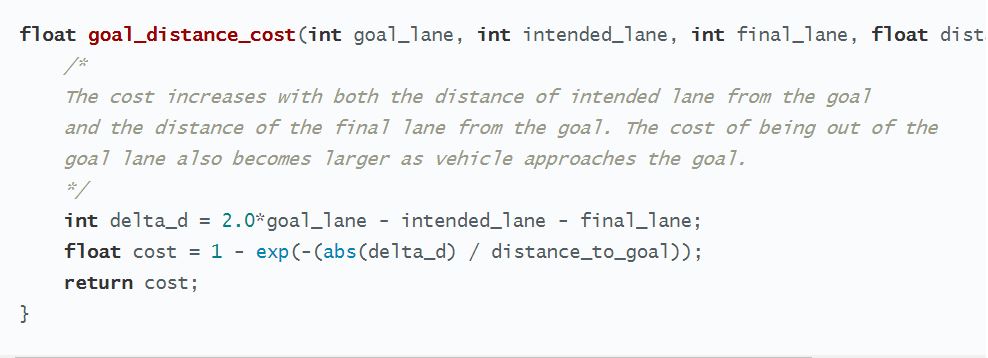
公式中,Δd是车道间的纵向距离,Δs是车辆到目标之间的距离。
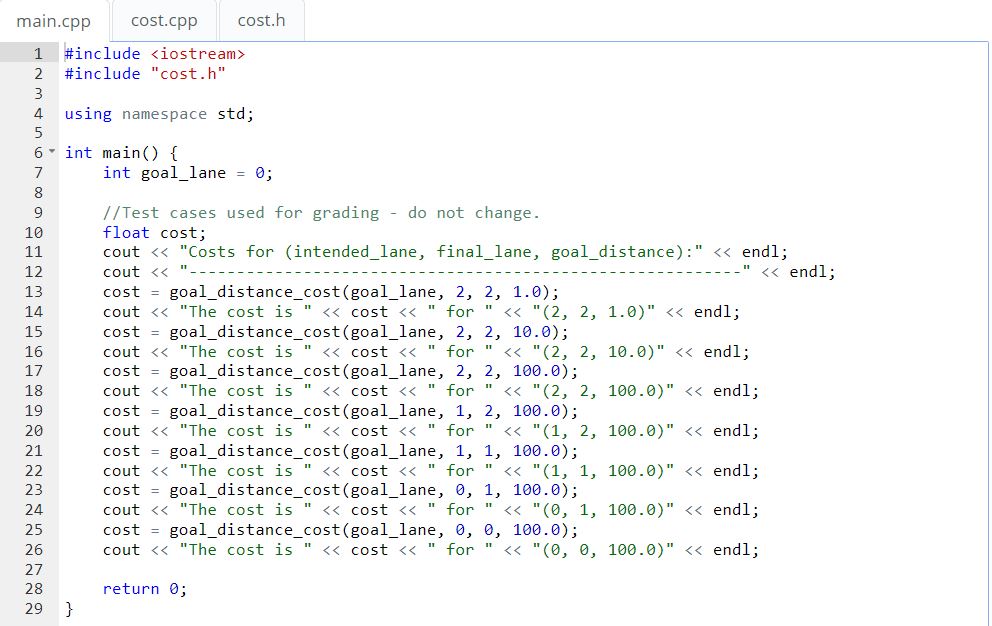
在这个测验中,需要用c++实现代价函数,但是这里有一个变换,有限状态机包含规划向右变道的车道(PLCR),和规划向左变道的车道(PLCL).
所以代价函数要符合状态机的改变,我们提供下面的输入。
1.预设车道:是当前车道中的一条车道
2.最后车道:给定行为的最终通道。对于LCR和LCL,这将是一条通道。
3.ΔS
4.目标车道
你在实施中的任务将是修改 | Δ d | 在上面的等式,以便它满足:
1.| Δ d |是预设车道和最后车道距离目标车道最近的距离。
2.代价函数为 KL, PLCR/PLCL, LCR/LCL.提供了不同的代价
3.成本函数生成的值在0到1的范围内