Normalization(归一化)
写这一篇的原因是以前只知道一个Batch Normalization,自以为懂了。结果最近看文章,又发现一个Layer Normalization,一下就懵逼了。搞不懂这两者的区别。后来是不查不知道,一查吓一跳,Normalization的方法五花八门,Batch Normalization, Layer Normalization, Weight Normalization, Cosine Normalization, Instance Normalization, Group Normlization, Switchable Normlization.... 估计我没看到的还有很多。而且郁闷的是,感觉越看越不懂了...
这里简单记录一下目前的理解与问题。
白化
白化的目的是希望特征符合独立同分布i.i.d条件。包括:
- 去除特征之间的相关性 —> 独立;
- 使得所有特征具有相同的均值和方差 —> 同分布。
这里我有了第一个问题。什么叫做去除特征之间的相关性?
比如,有两个输入向量,X1=(x11,x12,x13,x14), X2=(x21,x22,x23,x24)
去除特征之间的相关性,只是去除x11,x12,x13,x14之间的相关性,还是去除x11和x21的相关性?
Normalization的好处
- 使得数据更加符合独立同分布条件,减少internal corvariate shift导致的偏移
- 使数据远离激活函数的饱和区,加快速度。(我理解是只对sigmoid这样的激活函数有效,对relu则没有加速作用了)
Normalization基本公式
(mu):均值
(sigma):方差根
(b): 再平移参数,新数据以(b)为均值
(g): 再缩放参数,新数据以(g^2)为方差
归一化后的目标就是统一不同(x)之间的均值和方差
加入(g)和(b)的目的是使数据一定程度偏离激活函数的线性区,提高模型表达能力。因为均值是0的话正好落在sigmoid函数的线性部分。
第二个问题,g和b是根据什么确定的,是trainable的吗?
Batch Normalization
Batch Normalization是针对不同batch导致的数据偏移做归一化的方式。比如,一个batch有3个输入,每个输入是一个长度为4的向量。
(X1=(x11,x12,x13,x14))
(X2=(x21,x22,x23,x24))
(X3=(x31,x32,x33,x34))
在上述条件下,归一化时的均值是:
(mu=(frac{x11+x21+x31}{3},frac{x12+x22+x32}{3},frac{x13+x23+x33}{3},frac{x14+x24+x34}{3}))
这里主要展示一下计算时的方向,即对于每个元素位置,对不同的输入做归一化。方差同理。
第三个问题,很多文章都说batch norm需要在batch size较大,不同batch之间均值方差相差不大的情况下效果好。
即batch的均值方差跟整体的均值方差一致时效果好。
这我就不懂了,无论之前每个batch的分布是怎样的,经过归一化,都已经是相同分布了。为什么一定要原始batch之间分布相似呢?
Batch norm有个缺点,即需要记录每一个batch输入的均值和方差,对于变长的RNN网络来说计算麻烦。
第四个问题:为什么要记录每个batch的均值和方差?对RNN效果不好仅仅因为麻烦吗?
我个人理解BN在RNN上效果不好的原因是,虽然RNN训练时网络深度很深,但实际上只有一个神经元节点,相当于把所有层的神经元的均值和方差设定为相同的值了,导致效果不佳。
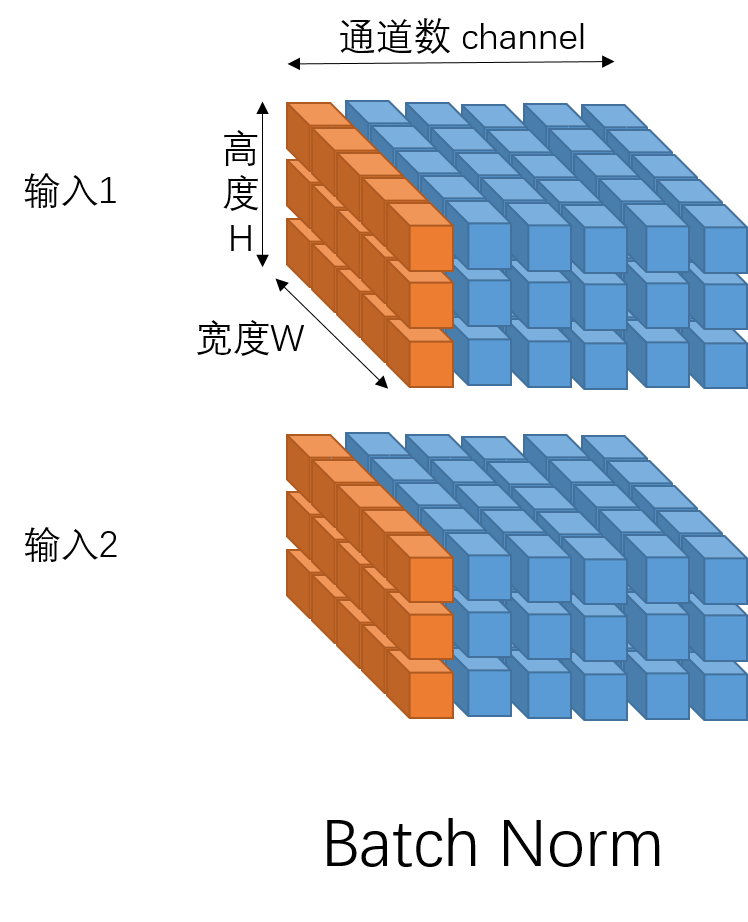
如果是图像,则输入是一个四维矩阵,(batch_size, channel_size, weight, height),此时batch norm是针对同一个batch的不同输入中属于同一通道的元素做归一化。如下图,是一个batch_size=2, channel_size=6, weight=5, height=3的例子。一次batch norm是对所有橙色部分元素做归一化。
Layer Normalization
Layer Normalization是针对同一个输入的不同维度特征的归一化方式。还是用上面的例子。
对于(X1)来说,layer norm的归一化均值是: (mu=frac{x11+x12+x13+x14}{4})
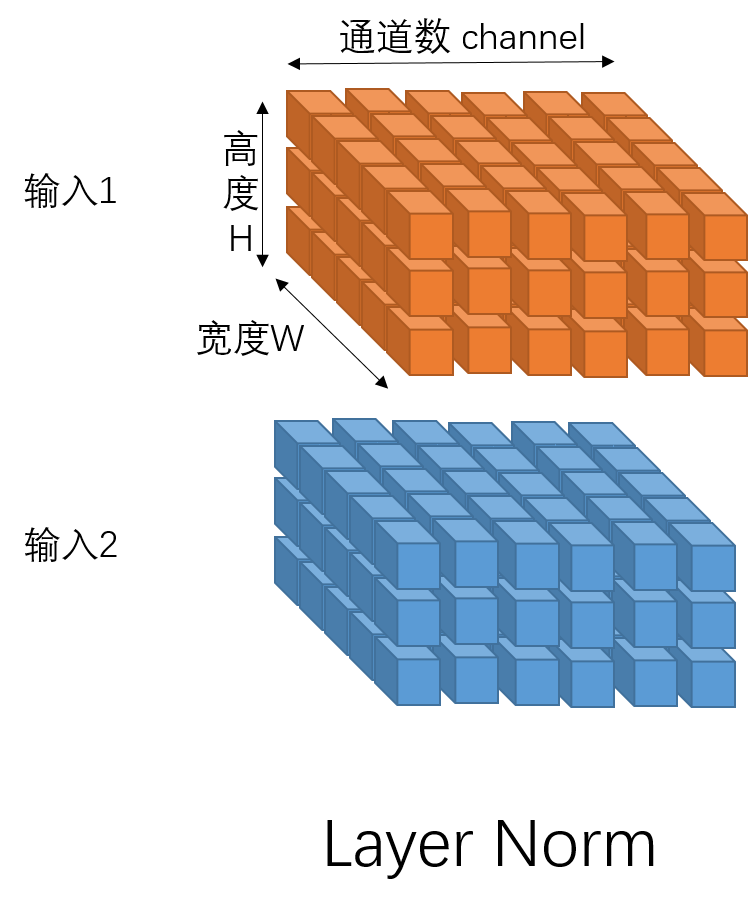
对于图像来说,则是对一个输入的所有元素做归一化。如下图橙色部分:
Instance Norm
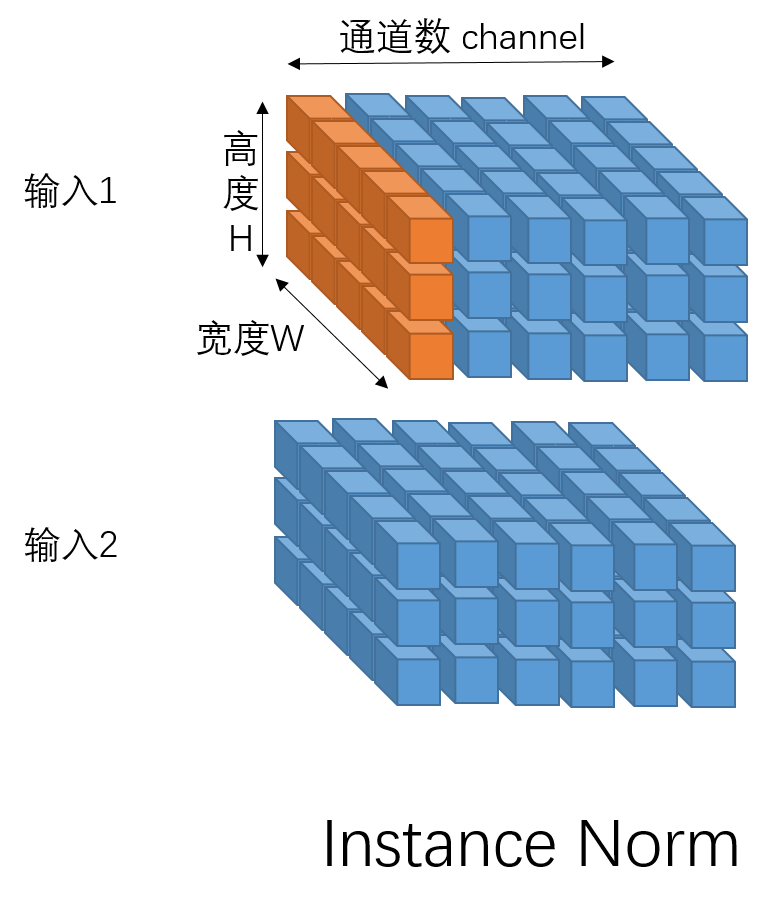
对一个输入图像的一个通道中的所有元素做归一化。如下图橙色部分:
Group Norm
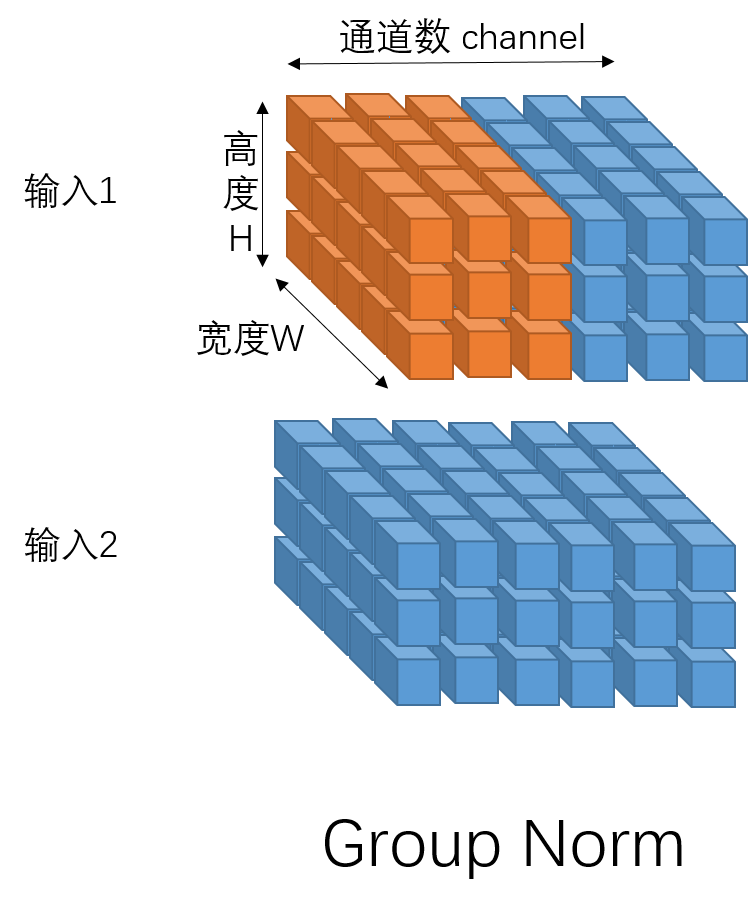
对于一个输入图像的多个通道元素做归一化。如下图橙色部分:
Weight Norm
前面的归一化方法都是从不同维度对输入数据做归一化,而weight norm则是对权重做归一化。
Cosine Norm
抛弃了权重和输入点积的计算方式,改用其他函数。