行为树下,允许有平行的任务,这个任务可能是个状态机,多个状态机可以平行执行。在复杂的应用情景下,行为树的实现要比状态机简单。
从名字上看,behaviour tree,首先是个tree,这样就会有node,整棵tree代表一系列的组合。其实可以想象火车编组站,从北京始发的车,每到达一个城市,这个城市就是一个node,通过走不同的node,到达了不同的地方,也就提供了不同的功能。每帧更新不会都遍历一次整棵树,而是只更新当前正在进行处理的节点即可。
NodeCanvas是先实现了一个图(Graph)的数据结构,里面定义了节点,连接等对象。行为树是图的一个子类,行为树上的节点是图里节点的子类。
每个节点的状态定义了5种:
Failure = 0,
Success = 1,
Running = 2,
Resting = 3,
Error = 4,
从名字上来看,分别告诉父节点,自己执行的结果是失败,成功还是没执行完,或者正在重置状态,或者出错了。
行为树上节点的类型有:
三大类,分别是Composite,Decorator,Leaf。 是不是所有的行为树都必须实现这几类节点呢?
从名字上来看,
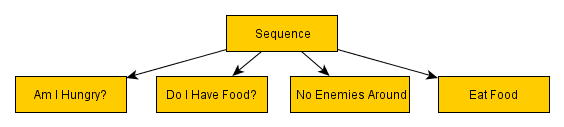
Composite定义了执行框架,最简单的就是Sequence,序列执行的节点流,如果一个节点执行失败,就返回,其余节点就不再执行,显然这种节点,对于完整性要求的事务非常合适。
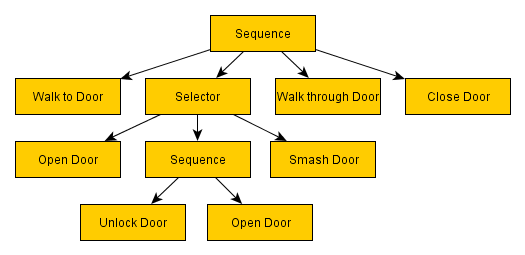
和Sequence相似正好相反的是 Selector,这种框架是,当子节点只要有一个成功,就返回,其余节点不再执行。所以说,sequence是对所有子节点执行的and操作,selector是对所有子节点执行or操作。比如,你下班回家,准备进房间的时候,发现门锁着(一个节点,检查门是否锁着,锁着意味着进入失败),拿出一把钥匙(如果找到的话就成功),然后就可以进房间了,当然这个过程还有很多条件,比如,当前的钥匙不对,需要再试其他钥匙。
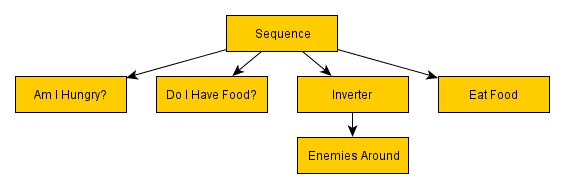
Decorator提供了转接功能,只能有一个子节点。负责对子节点的输出结果进行二次加工,再返回到父节点。例如子节点计算一个值,当这个值在什么区间内返回什么,超过区间返回别的。这种转接口就多了,比如总是返回true,或者总是返回false
leaf定义了具体的行为,也是承载主要功能的节点,不能有子节点。包括子树节点SubTree,单次行为节点Action,条件节点Condition,状态机节点FSM,激活的状态Enable/Disable,根节点转移RootSwitch等。最简单的实现,就是行走功能节点,驱动玩家在场景中行走。其实叶节点可以认为是函数,而composite和decorator就是调用这些函数的地方。
参考:
http://www.gamasutra.com/blogs/ChrisSimpson/20140717/221339/Behavior_trees_for_AI_How_they_work.php
关于决策树和行为树的对比:
http://gamedev.stackexchange.com/questions/51693/decision-tree-vs-behavior-tree