| 机器学习实验-计算机18级 | https://edu.cnblogs.com/campus/ahgc/machinelearning |
|---|---|
| 作业要求 | https://edu.cnblogs.com/campus/ahgc/machinelearning/homework/11950 |
| 学 号 | 3180701236 |
一、实验目的
-
理解感知器算法原理,能实现感知器算法;
-
掌握机器学习算法的度量指标;
-
掌握最小二乘法进行参数估计基本原理;
-
针对特定应用场景及数据,能构建感知器模型并进行预测。
二、实验内容
-
安装Pycharm,注册学生版。
-
安装常见的机器学习库,如Scipy、Numpy、Pandas、Matplotlib,sklearn等。
-
编程实现感知器算法。
-
熟悉iris数据集,并能使用感知器算法对该数据集构建模型并应用。
三、实验步骤
# 导入包
import pandas as pd
import numpy as np
from sklearn.datasets import load_iris
import matplotlib.pyplot as plt
%matplotlib inline
# load data,下载数据
iris = load_iris()
df = pd.DataFrame(iris.data, columns=iris.feature_names)#生成表格
df['label'] = iris.target
# 统计鸢尾花的种类与个数
df.columns = ['sepal length', 'sepal width', 'petal length', 'petal width', 'label']
df.label.value_counts() # value_counts() 函数可以对df里面label每个值进行计数并且排序,默认是降序
结果:
2 50
1 50
0 50
Name: label, dtype: int64
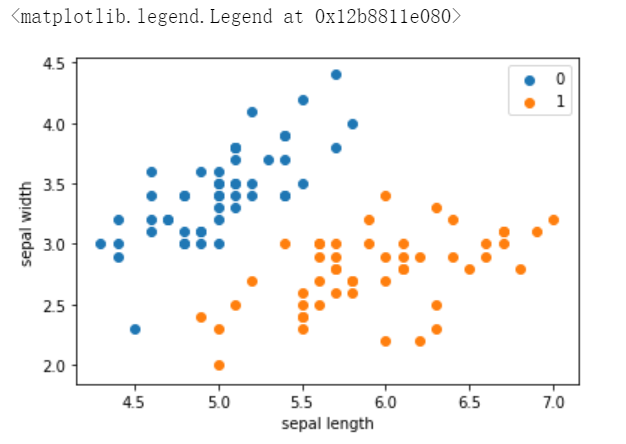
#画数据的散点图
plt.scatter(df[:50]['sepal length'], df[:50]['sepal width'], label='0')#将数据的前50个数据绘制散点图
plt.scatter(df[50:100]['sepal length'], df[50:100]['sepal width'], label='1')#将数据的50-100之间的数据绘制成散点图
plt.xlabel('sepal length')#给x坐标命名
plt.ylabel('sepal width')#给y坐标命名
plt.legend()
结果:
#对数据进行预处理
data = np.array(df.iloc[:100, [0, 1, -1]])#iloc函数:通过行号来取行数据,读取数据前100行的第0,1列和最后一列
X, y = data[:,:-1], data[:,-1]#X为data数据中除去最后一列的数据,y为data数据的最后一列(y中有两类0和1)
y = np.array([1 if i == 1 else -1 for i in y])#将y中的两类(0和1)改为(-1和1)两类
# 定义算法
# 此处为一元一次线性方程
class Model:
def __init__(self):
self.w = np.ones(len(data[0])-1, dtype=np.float32) #初始w的值
self.b = 0 #初始b的值为0
self.l_rate = 0.1 #步长为0.1
# self.data = data
def sign(self, x, w, b):
y = np.dot(x, w) + b #dot进行矩阵的乘法运算,y=w*x+b
return y
#随机梯度下降法
def fit(self, X_train, y_train):
is_wrong = False #初始假设有误分点
while not is_wrong:
wrong_count = 0 #误分点个数初始为0
for d in range(len(X_train)):
X = X_train[d] #取X_train一组及一行数据
y = y_train[d] #取y_train一组及一行数据
if y * self.sign(X, self.w, self.b) <= 0: #为误分点
self.w = self.w + self.l_rate*np.dot(y, X) #对w和b进行更新
self.b = self.b + self.l_rate*y
wrong_count += 1 #误分点个数加1
if wrong_count == 0: #误分点个数为0,算法结束
is_wrong = True
return 'Perceptron Model!'
def score(self):
pass
perceptron = Model()#生成一个算法对象
perceptron.fit(X, y)#将测试数据代入算法中
结果:
'Perceptron Model!'
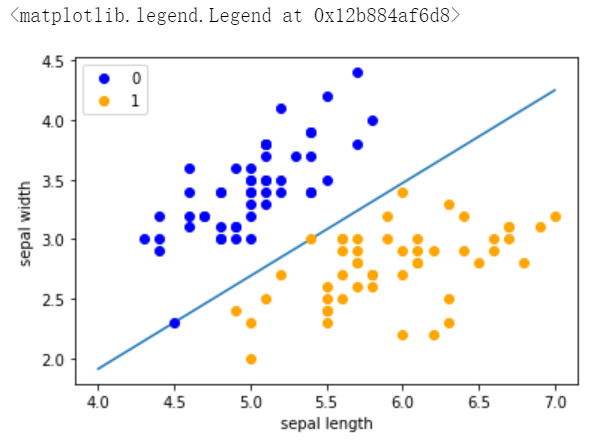
#画出超平面
x_points = np.linspace(4, 7,10) #用于产生4,7之间的10点行矢量。其中4、7、10分别为起始值、中止值、元素个数。----产生x坐标
y_ = -(perceptron.w[0]*x_points + perceptron.b)/perceptron.w[1] #绘制超平面
plt.plot(x_points, y_)
plt.plot(data[:50, 0], data[:50, 1], 'bo', color='blue', label='0')#将数据的前50个数据绘制散点图
plt.plot(data[50:100, 0], data[50:100, 1], 'bo', color='orange', label='1')#将数据的50-100之间的数据绘制成散点图
plt.xlabel('sepal length')#给x坐标命名
plt.ylabel('sepal width')#给y坐标命名
plt.legend()
结果:
#生成sklearn结果与上面手写函数的结果对比
from sklearn.linear_model import Perceptron ## 导入感知机模型
clf = Perceptron(fit_intercept=False, max_iter=1000, shuffle=False)
#fit_intercept(默认True)是否对参数 b 进行估计,若为False则数据应是中心化的
#max_iter(默认1000)最大迭代次数
#shuffle(默认True)每轮训练后是否打乱数据
clf.fit(x, y)
结果:
Perceptron(alpha=0.0001, class_weight=None, early_stopping=False, eta0=1.0,
fit_intercept=False, max_iter=1000, n_iter_no_change=5, n_jobs=None,
penalty=None, random_state=0, shuffle=False, tol=0.001,
validation_fraction=0.1, verbose=0, warm_start=False)
print(clf.coef_)#权值w参数
print(clf.intercept_)#偏置b参数
结果:
[[ 16.3 -24.2]]
[0.]
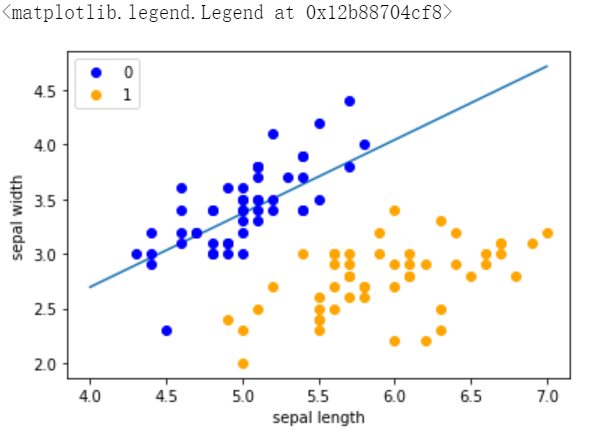
#画出sklearn结果的散点图
x_ponits = np.arange(4, 8)#x,为4,5,6,7,默认步长为1,起始为4,终止为8,不取8
y_ = -(clf.coef_[0][0]*x_ponits + clf.intercept_)/clf.coef_[0][1]#绘制超平面
plt.plot(x_ponits, y_)
plt.plot(data[:50, 0], data[:50, 1], 'bo', color='blue', label='0')#将数据的前50个数据绘制散点图
plt.plot(data[50:100, 0], data[50:100, 1], 'bo', color='orange', label='1')#将数据的50-100之间的数据绘制成散点图
plt.xlabel('sepal length')#给x坐标命名
plt.ylabel('sepal width')#给y坐标命名
plt.legend()
结果:
五、个人小结
感知机
①是一种人工神经网络
感知机可以通过数学统计学方法完成对函数的估计或近似,能在外界信息的基础上改变内部结构,是一种自适应系统,通俗的讲就是具备学习功能。
②是一种最简单形式的前馈神经网络
感知机模型的参数从输入层向输出层单向传播,整个网络中无反馈。感知机是最简单形式是因为只包含一层传播。
③是一种二元线性分类器
感知机的输出结果只有+1 和–1二值,所以说感知机是一个二元分类器;
在二维空间中,感知机的模型就是一条直线,将平面中的正负样本点分离成两份,在三维中,感知机的模型就是一个平面,将空间中的正负样本点分离成两份,放到更高维的空间中,感知机的模型就是一个超平面;
这也就是说,如果在二维空间中,不存在直线刚好将正负样本点分离成两份,在三维空间中,不存在平面将空间中的正负样本点分离成两份,那么你的数据就无法使用感知机模型;
感知机的使用前提是数据本身线性可分。