原文地址:https://www.cnblogs.com/liaohuiqiang/p/9606901.html
前言
本文主要介绍2012-2015年的一些经典CNN结构,从AlexNet,ZFNet,OverFeat到VGG,GoogleNetv1-v4,ResNetv1-v2。
在论文笔记:CNN经典结构2中我介绍了2016-2017年的几个经典CNN结构,WideResNet,FractalNet,DenseNet,ResNeXt,DPN,SENet。另外,在ImageNet历年冠军和相关CNN模型中,我简单介绍了ImageNet和历年冠军。
AlexNet
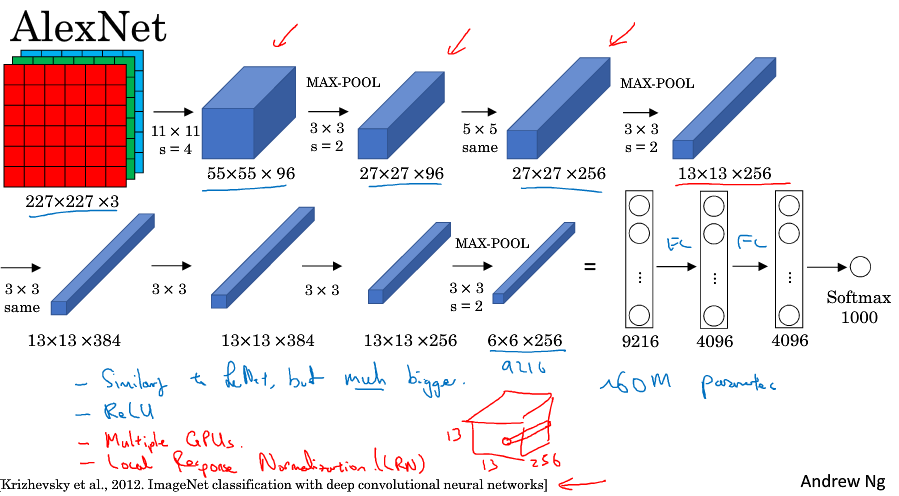
- 贡献:ILSVRC2012冠军,展现出了深度CNN在图像任务上的惊人表现,掀起CNN研究的热潮,是如今深度学习和AI迅猛发展的重要原因。ImageNet比赛为一直研究神经网络的Hinton提供了施展平台,AlexNet就是由hinton和他的两位学生发表的,在AlexNet之前,深度学习已经沉寂了很久。
- 网络结构:如下图所示,8层网络,参数大约有60 million,使用了relu函数,头两个全连接层使用了0.5的dropout。使用了LRN和重叠的池化,现在LRN都不用了,一般用BN作Normalization。当时使用了多GPU训练。
- 预处理:先down-sample成最短边为256的图像,然后剪出中间的256x256图像,再减均值做归一化(over training set)。 训练时,做数据增强,对每张图像,随机提取出227x227以及水平镜像版本的图像。除了数据增强,还使用了PCA对RGB像素降维的方式来缓和过拟合问题。
- 预测:对每张图像提取出5张(四个角落以及中间)以及水平镜像版本,总共10张,平均10个预测作为最终预测。
- 超参数:SGD,学习率0.01,batch size是128,momentum为0.9,weight decay为0.0005(论文有个权重更新公式),每当validation error不再下降时,学习率除以10。权重初始化用(0,0.01)的高斯分布,二四五卷积层和全连接层的bias初始化为1(给relu提供正值利于加速前期训练),其余bias初始化为0。
ZFNet
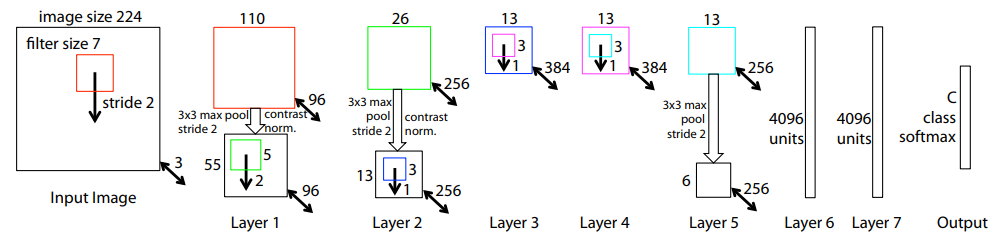
- 贡献:ILSVRC2013分类任务的冠军,使用反卷积对CNN的中间特征图进行可视化分析,通过分析特征行为找到提升模型的办法,微调Alexnet提升了表现。ZFNet的Z和F指的是Zeiler和Fergus,曾是hinton的学生,后在纽约大学读博的Zeiler,联手纽约大学研究神经网络的Fergus提出了ZFNet。
- 冠军?:严格意义上来说当时分类冠军是Clarifai,但是我们通常讨论的ILSVRC2013冠军(winner)指的是ZFNet。ZF中的Zeiler是Clarifai的创建者和CEO。
- 网络结构:如下图所示,和AlexNet一样,头两个全连接层后面加0.5的dropout。相比于AlexNet,主要区别是使用了更小的卷积核和步长,11x11的卷积核变成7x7的卷积核,stride从4变成了2。另外,通过可视化发现第一层的卷积核影响大,于是对第一层的卷积核做了规范化,如果RMS(Root Mean Square)超过0.1,就把卷积核的均方根normalize为固定0.1。
- 其它数据集:ZFNet还在Caltech-101,Caltech-256,Pascal AOC-2012上做了迁移学习的实验。
- 预处理和超参数:和AlexNet基本一致。权重初始化不同,权重初始化为0.01,bias初始化为0。
- 更多:具体内容我在另一篇论文笔记:可视化CNN中有所提及。
OverFeat
- 贡献:ILSVRC2013定位任务的冠军,用一个CNN集成了分类,定位和检测三个任务,提出了多尺度的方法。OverFeat是由Yann Lecun团队提出,Lecun提出的LeNet可以说是CNN的开端,提出来并没有火起来,因为当时机器性能不高而且SVM也能达到类似的效果甚至超过。
- 网络结构:相比于AlexNet,不再使用LRN;使用非重叠的池化;使用更小的步长,大的步长可以提高速度但是损害了精度。和AlexNet一样,头两个全连接层后面加0.5的dropout。
- 预处理和超参数:和AlexNet基本一致。权重初始化不同,全部用(0,0.01)的高斯分布初始化。momentum为0.6,学习率为0.005。在(30,50,60,70,80)epoch学习率减半(decreased a factor by 0.5)。
- 预测:在测试阶段,不再使用AlexNet的10 views法(4 corners and center, with horizontal flip),探索了多尺度来进行平均预测的方法,直接从原图rescale成多个尺度的图像输入网络进行多尺度预测。
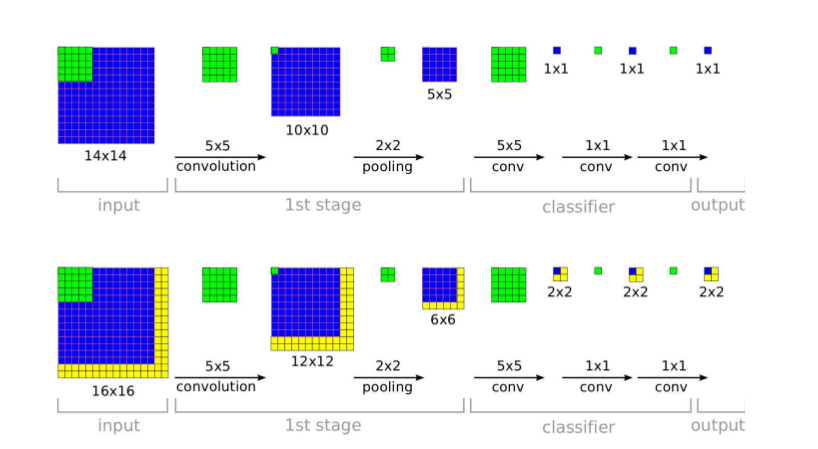
- 多尺度(和全卷积):如下图所示,把全连接层改成全卷积(5x5卷积),在网络最后配合全局最大池化,可以输入多尺度的图像,举例来说,输入14x14的图像,最后得到的是1x1个分类特征,输入16x16的图像最后会得到2x2个分类特征,但是通过全局最大池化就可以转为1x1个分类特征,对于多尺度输入,输出是一致的。而且从下图中的蓝色色块可以看出,在16x16上卷积可以看作用14x14的窗口在上面滑动2步的4次卷积结果。
- 更多:具体内容我在另一篇论文笔记:OverFeat中有所提及。
VGG
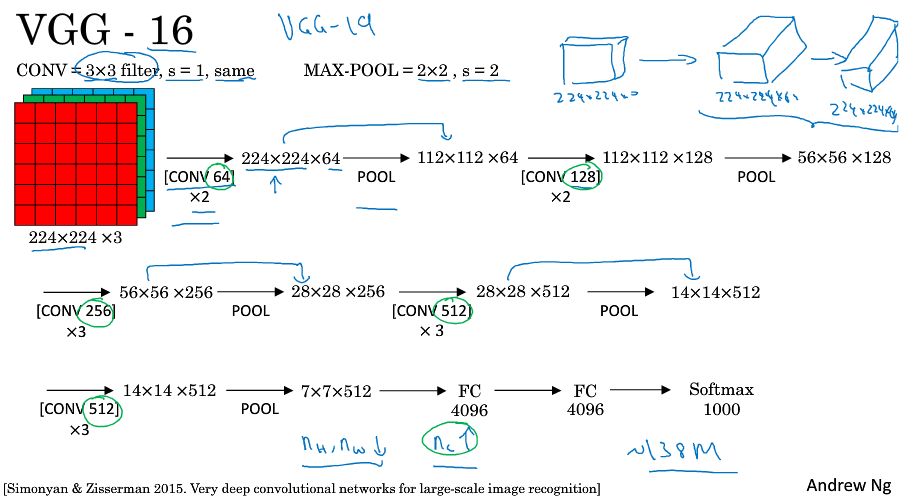
- 贡献:ILSVRC2014定位任务的冠军(Winner),分类任务的亚军(runner-up)。该网络的特点在于结构规整,通过反复堆叠3x3的卷积,卷积核数量逐渐加倍来加深网络,后续的很多CNN结构都采用了这种3x3卷积思想,这是一个很大的影响。ZFNet和OverFeat都使用了更小的卷积核,更小的步长来提升AlexNet的表现,相比之下,VGG则是探索CNN的深度,通过固定其它参数,然后稳定地叠加深度。
- 网络结构
如下图所示,VGG-16,16层,参数大约有138 million。实验发现LRN的加入没有提升反而更差,舍弃使用。实验发现1x1效果更差,于是没有使用,1x1卷积在Network in Network(颜水成)中提出推广,是很重要的思想,在GoogleNet和ResNet都有用到。
使用小卷积核3x3可以捕捉左右上下的信息,而且利于堆叠深度(保证参数不要过大)。步长为1。same卷积。
两个3x3卷积可以和5x5卷积达到一样的感受野。三个3x3卷积可以和7x7卷积达到一样的感受野。使用三个3x3的好处在于使用了3个非线性变换,同时后减小了参数,假设输入输出通道数一样,那么有
和AlexNet一样,头两个全连接层后面加0.5的dropout。 - 超参数:和AlexNet基本一致。batch size是256。初始化也是用(0,0.01)的高斯分布,只不过VGG先训练一个浅层的网络,然后把浅层网络的部分参数来初始化深层网络部分参数,其它参数还是用高斯分布。值得注意的是论文提交后VGG发现使用glorot的初始化方法可以不用预训练。
- 预处理:和AlexNet不同,在下采样的时候不是变成256,变成一个S,S有两种方法来设定。第一个方法是固定的S(single-scale),固定为256或384。为了加速384的网络,用256预训练的模型进行权重初始化。另外学习率调小为0.001。第二个方法从[256, 512]中随机采样S(multi-scale,注意这里的是multi-scale training,和overfeat中的multi-scale test含义不一样),这可以看成用尺寸抖动(scale jittering)对训练集进行增强。为了加速,使用384预训练的模型进行权重初始化。
- 预测:采用了AlexNet的10 views法(VGG论文中把它称作multi-crop评估)和overfeat的多尺度预测方法(VGG论文中把它称作dense评估)相结合。在OverFeat已经提到了multi-crop是有缺点的,存在冗余的卷积计算,所以使用了dense评估,但是Inceptionv1的论文中提到multi-crop使用大量crops能提高准确率因为它的采样更精细。而VGG认为实作上准确率的提升不足以弥补速度,但是为了参考起见,还是跑了multi-scrop的方法。在实验中,两者结合优于multi-crop优于dense,好那么一点点,差别不大。
- 集成:实验的最后融合了多个模型(集成),最好的模型是融合了VGG-16和VGG-19,训练使用multi-scale training,测试使用multi-crop和dense评估相结合。在AlexNet,ZFNet和OverFeat最后的实验都会使用集成,最好的模型一般都是集成的结果。
- 定位:VGG的定位任务的模型是在OverFeat的基础上做了一些修改。对于bounding box的预测有两种,SCR(single-class regression)是所有类共享一个框,这时最后输出是4维向量。PCR(per-class regression)是每个类一个框,这样最后输出就是4x1000,其中1000表示1000类。
- 泛化:和ZFNet一样,VGG也做了迁移学习,用ILSVRC的数据预训练,然后迁移到其它数据集VOC-2007,VOC-2012,Caltech-101,Caltech-256。
GoogleNet(Inceptionv1)
- 贡献:ILSVRC2014分类任务的冠军。该网络设计了Inception块代替人工来选择卷积类型,然后堆叠Inception块(增加深度)形成Inception网络。去除了全连接层(占据了网络的大部分参数),使用了全局均值池化(思想来自Network in Network),大大减小了参数量。这两个思想在GoogleNet后面的一些论文中都有体现,一个是Inception块的自动选择网络结构(Google后面发表了一些自动选择网络超参,网络优化器,网络激活函数的论文),另一个是减小模型参数和计算资源(Google的mobileNet,类似工作还有face++的shuffleNet)。
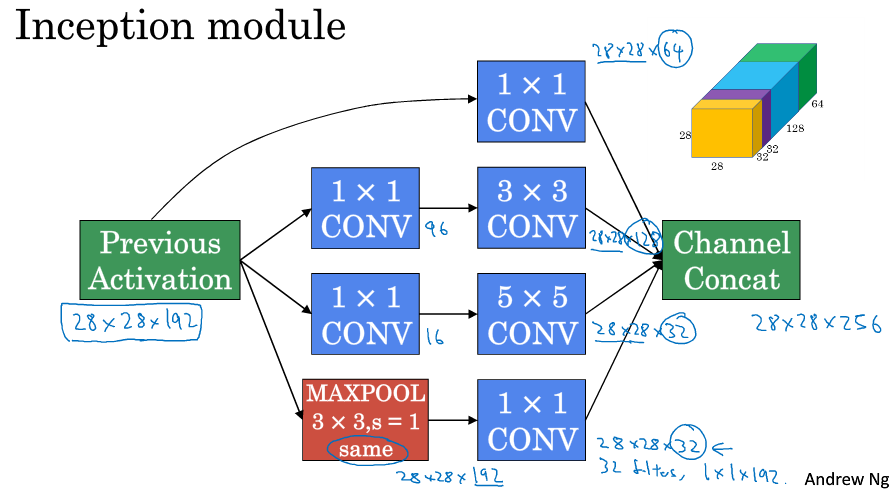
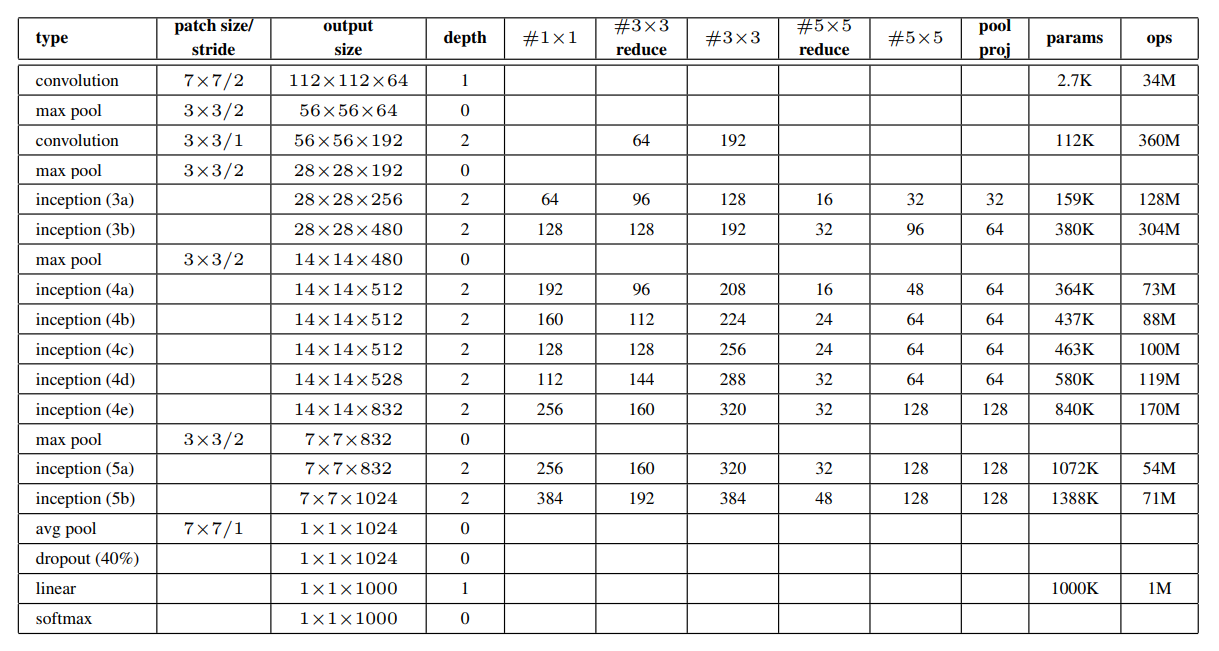
- 网络结构:如下图所示为Inception块。网络总共有22层,图太大,这里就给个表格。可以看到虽然把全连接替换成了全局均值池化(这后面还是使用了0.4的dropout),但是网络图中最后还是有一个全连接层,这是为了便于把网络fine tune到其它数据集。
- 参数:为了提升模型表现,典型的办法是增大模型(增加深度或宽度),但是这样会带来过大的参数,然后导致计算资源增大而且需要的数据更多(而高质量数据往往是昂贵的),所以要考虑降低参数。Inceptionv1虽然有22层的参数却只有5 million,是同期VGG16(138 million)的1/27,是AlexNet(60 million)的1/12而准确率却远胜AlexNet。
- 1x1卷积好处:减小了参数,允许增加深度; 可以降维,构建瓶颈层来减小计算成本,Inception块中就是通过在3x3和5x5后面加入1x1来减小计算;增强了网络的表达能力(可以根据自己的意愿,或压缩或增加或保持通道数)。还有配合全局均值池化来代替全连接层,这个就是为了能大大减小模型的参数。1x1的思想也来自Network in Network。
- 超参数和预处理:因为比赛的过程做了很多变动,包括采样方法和各种超参,所以很难定义一个有效的指导去训练这个网络。只给出了几个超参数,固定学习率,每8epoch下降4%,momentum是0.9。
- 预测:先下降样出256,288,320和352大小,分别从左中右三个方位裁(如果是人画像则从上中下三个方位裁),然后从4 corners和center剪出224x224再加上把正方形缩放到224,以及它们的水平镜像。这样就可以得到4x3x6x2也就是144个crops,最后对crops取平均。
- 集成:和之前的网络一样,最后也使用了集成,训练了7个版本的网络进行集成,使用Polyak averaging进行平均,7个网络使用一样的初始化和学习率设置,不同之处在于数据采样的方法和顺序。
- 目标检测:Inceptionv1的目标检测使用了类似R-CNN的方法来完成。
- 辅助输出:Inceptionv1中有两个辅助输出,说是因为太深的网络的梯度回传能力有限(梯度消失),于是在中间层接另两条分支来利用中间层的特征,可以增加梯度回传,还有附加的正则化作用。然后在v3的论文中又提到说利用中间层特征的想法可能是错的,因为去掉低层的辅助(第一个辅助输出)对最终结果并没有什么影响,但是还是强调了辅助输出的正则化效果,因为在辅助输出中加入BN和dropout可以提升主输出表现。
GoogleNet(Inceptionv2)
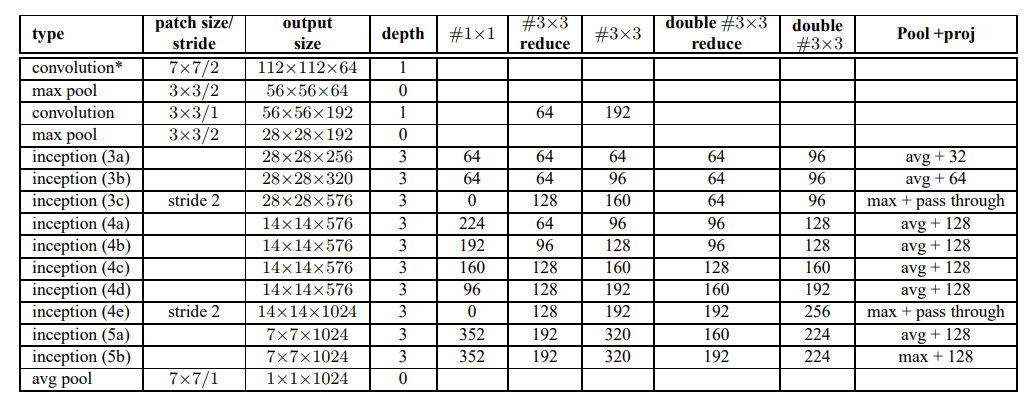
- 贡献:学习VGG,使用两个3x3卷积代替5x5的大卷积(保持感受野的同时又可以减小参数量),还使用了众所周知的BN。值得注意的是Inception-BN在v4的论文中把这个网络被称为v2,而在v3的论文中有另外一个v2(v3的一个低配版)。这两篇论文中提到的v2不是同一个v2,通常说的v2指的是这个Inception-BN。
- 网络结构:如下图所示,主要改变有,用两个3x3代替5x5,28x28的Inception块从2个变成了3个,pooling时有些是avg有些是max,在Incetpion块之间不再有额外的max-pool而是直接把卷积和池化的stride设置为2。BN被用在每一个输入层后面(先BN再激活)。batch size为32。网络使用DistBelief(Tensorflow前身)训练
- 其它变动: 增大学习率并加快学习率衰减(适用BN后的数据),移除dropout并减小L2权重衰减(BN有一定的正则效果),去除LRN(发现用了BN后不需要LRN了),更彻底对训练样本进行shuffle,减小数据增强时对数据的光学畸变(因为BN训练更快,每个样本被训练次数变少,模型需要注重更真实的样本)。
- 集成:最好的结果当然还是要集成了(之前的BN笔记中没有提及)。集成了6个网络,都是基于BNx30,6个版本分别在卷积层增加初始化权重;使用dropout 5%;使用dropout 10%;在Inceptionv1适用dropout 40%;不使用卷积;先激活再BN。集成方式还有multi-crop的使用和Inceptionv1一样。
- 更多:关于BN(包括我在上一条提到的BNx30)我在另一篇论文论文笔记:BN中有所提及,这篇论文也是讲述Inception-BN的论文
GoogleNet(Inceptionv3)
- 贡献:通过一系列的卷积分解和正则化手段来提升模型。这篇论文称为v3论文,里面有一个低配版v3称为v2,这里的v2只是v3这篇论文的v2,这一节提到的v2都是指这个v2。平常说的v2指的是BN那篇论文的v2。
- 训练配置:使用tensorflow训练,学习率为0.045,以0.94的指数率每两轮衰减一次。梯度裁剪阈值为2。
- v2网络结构:共42层,网络图就不放了,主要改动有如下。图有点多,这里就不放图了,各个改动模块图可以参考后面v4的结构图。
- 修改部分Inception块,使5x5分解成2个3x3卷积(可参考下面v4的InceptionA)。
- 修改部分Inception块,分解成非对称卷积(把nxn分解成1xn和nx1卷积,这里n=7。注意原始结构并没有7x7卷积)(可参考下面v4的InceptionB)。
- 修改部分Inception块,扩大卷积核数量(汇聚的分支数量)(可参考下面v4的InceptionC)
- 修改部分Inception块,减小特征图大小(使用并行的stride为2的卷积和池化)(可参考下面v4的Reduction)
- v3网络结构:在以上基础上,加入如下改动
- 用RMSProp训练,decay为0.9,为1.0
- 使用Label smoothing进行模型正则
- 开头第一层7x7分解成3个3x3卷积
- 加入带BN的辅助分类器
GoogleNet(Inceptionv4,Inception-ResNet)
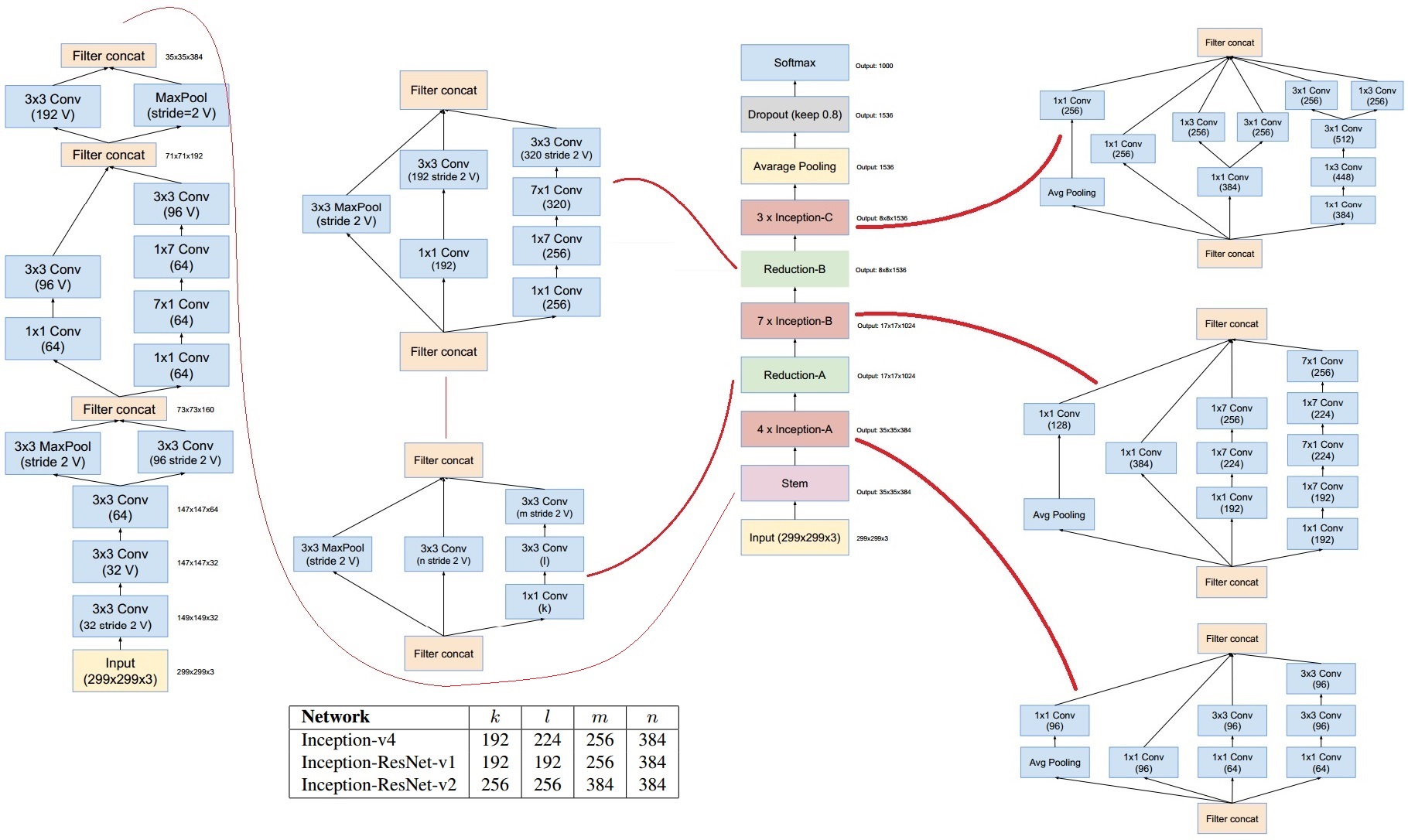
- 贡献:基于v3的基础,引入残差结构,提出了Inception-ResNet-v1和Inception-ResNet-v2。同时修改了Inception提出了Inceptionv4,发现Inceptionv4能达到Incetpion-ResNet-v2类似的结果,认为残差结构对于训练深度网络不是必须的(之前看过一篇分形网络的论文也提出了”残差块并不是训练深度网络的必要组件”的观点,我在论文笔记:分形网络有所提及)。
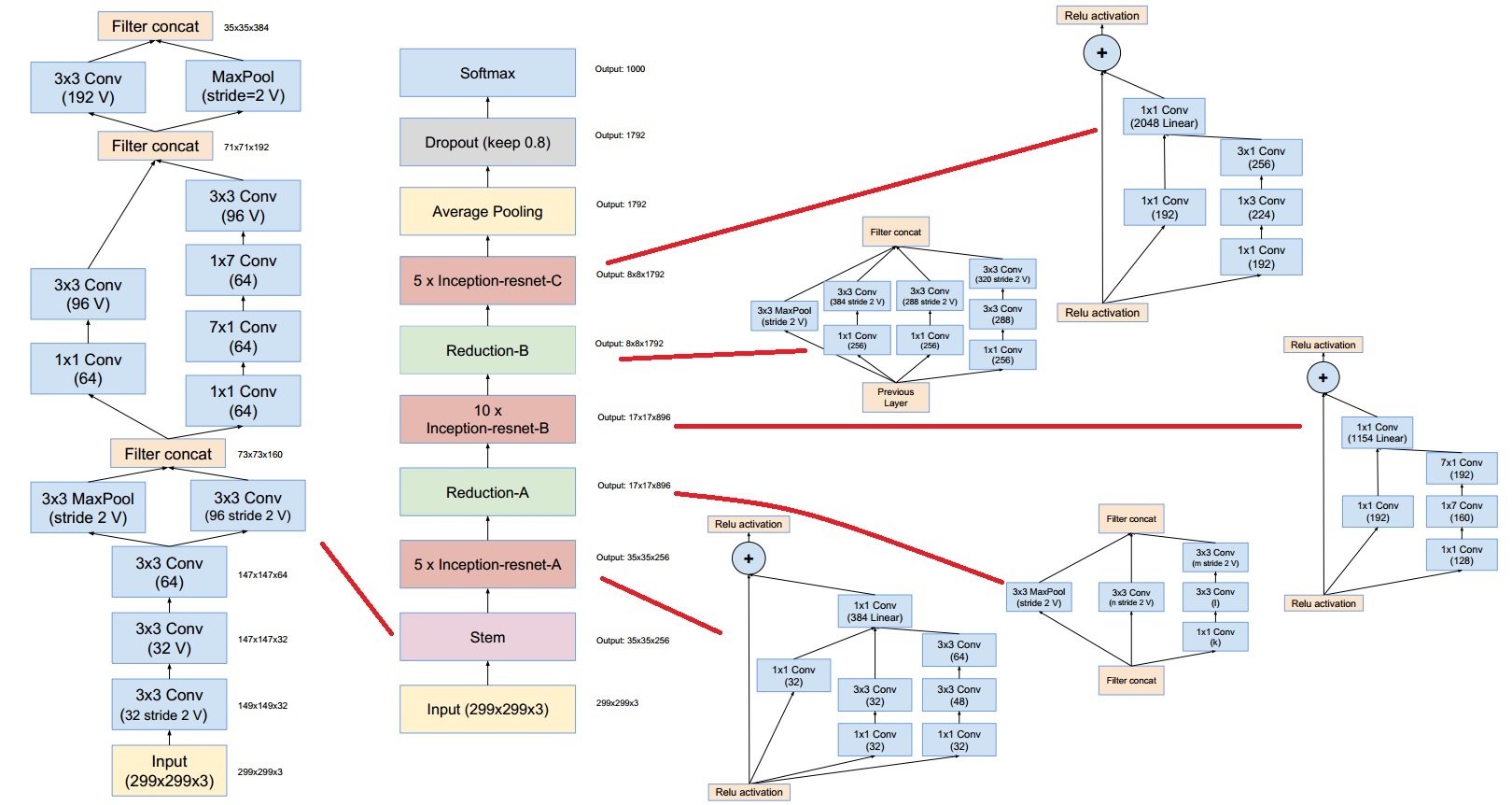
- v4网络结构:如下第一个图是v4。
- Inception-ResNet:探索了多种Inception-ResNet,论文只阐述了两个。其中Inceptin-ResNet-v1和Inceptinv3计算代价差不多,Inceptin-ResNet-v2和Inceptionv4计算代价差不多,然而实作上Inceptionv4慢很多可能是因为层数太多。在带有ResNet的Inception中,还有一个和纯Inception的不同点是只在传统层上使用BN,不在BN层上使用,这样可以减小计算从而堆叠更多Inceptin块。
- Inception-ResNet-v2结构:如下第二个图是Inception-ResNet-v2(输出的shape是Inception-ResNet-v1的)。
- 训练配置:tensorflow,RMSProp,decay为0.9,为1.0,学习率为0.045,以0.94的指数率每两轮衰减一次。
ResNet
- 贡献:ILSVRC2015冠军(分类,检测,定位),由MSRA的何铠明等人提出,通过使用残差块训练了152层的网络,降低了错误率。解决了退化问题(plain网络随着网络加深,错误率升高),而使用残差后,随着网络加深,错误率还是能下降。
- 网络加深:对于网络加深,会出现梯度消失或梯度爆炸,这个问题可以通过正则初始化(何凯明初始化等等)和BN来解决。
- 退化问题:然而深层网络到了一定深度,准确率趋近饱和,而且继续加深的话会降低准确率,这称为退化问题(degradation),而且这个问题并不是过拟合导致的(过拟合在训练集应该更好),也不是梯度消失造成的(论文检查了梯度)。
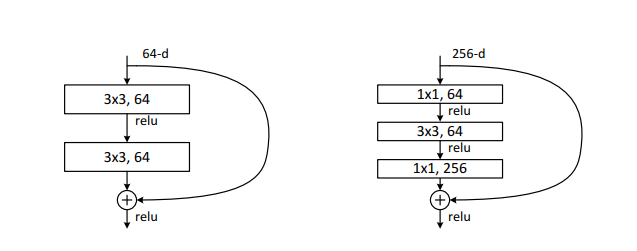
- 残差块:为了解决退化问题,提出了残差学习,如下图所示为残差块,假设本来是要学习H(x),加了一条恒等映射之后我们要学习的就是F(x) = H(x) - x,(假设)学习F(x)会比学习H(x)更容易,最极端的情况就是假设我们要学习的映射是x,那么让F(x)为0,比学习到H(x)为恒等映射要容易。这种做法的motivation是,如果增加的层能被构建成恒等映射层,那么一个更深的网络的准确率至少不会低于浅层网络。
- 残差块的相加:当残差块的输入和输出不是相同维度时(因为部分残差块会使用stride为2的卷积来降采样),有两种方法来保证维度一致,一个是补0,另一个是乘以W矩阵做映射(使用1x1卷积)。
- 训练配置:预处理时像VGG一样随机采样[256, 480]的scale,然后像AlexNet一样crop出224x224的图像以及水平翻转,然后做mean substracted。预测时候使用AlexNet的10-crop测试法,最好的结果是跟从VGG中的全卷积后的multi-scale评估,scale为{224, 256, 384, 480, 640}。在每个卷积的激活前使用BN,不使用dropout。何凯明初始化。SGD,batch size为256,学习率从0.1开始每次错误率平缓时就除以10,模型训练了60万个iteration,权重衰减为0.0001,momentum为0.9。
- Identity和projection:对于残差块的相加,有三种配置,A配置是捷径用identity,需要增加维度时的捷径补0。B配置是捷径一般都用identity,但是增加维度时使用映射。C配置是所有捷径都使用映射(1x1卷积)。表现是C>B>A,但是三者差异不大,实作上不会使用C,因为C增加了参数和计算。
- 网络结构:论文阐述了ResNet-18-34-50-101-152。其中ResNet-18/34使用配置A,ResNet-50/101/152使用配置B,此外使用了bottleneck结构,如下第一个图的右图所示。
- 其它实验:除了在ImageNet上,还在CIFAR-10上做了实验。还在Pascal和MS COCO上做了目标检测的实验。检测使用的是Faster R-CNN的算法,我在另一篇论文笔记:经典目标检测算法(R-CNN,Fast R-CNN,Faster R-CNN,YOLOv1-v3)中介绍了相关的几个经典检测算法。
ResNetv2
- 贡献:在v1的基础上做了修改,提升了表现。
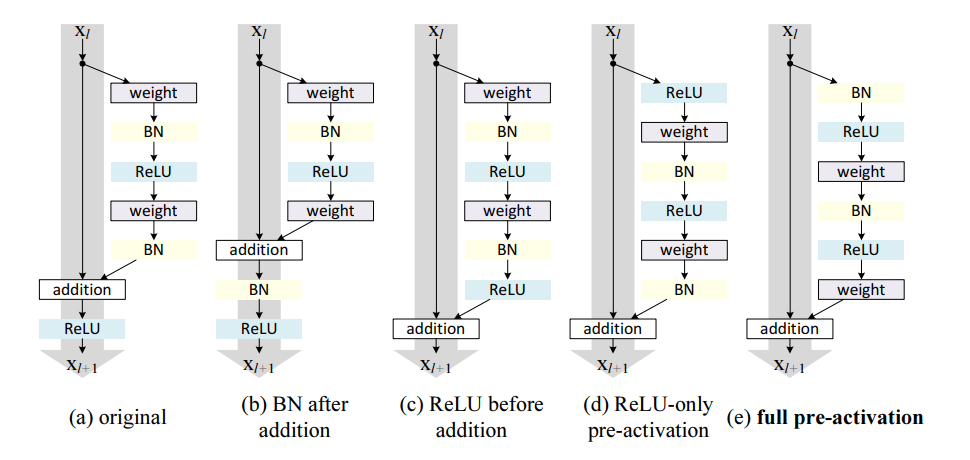
- 分析:ResNetv1的公式如下,论文分析了h函数和f函数的选取,即shortcut路径的函数选取,以及addition后的操作选取。在ResNetv1中,h函数为恒等映射,f函数为relu函数,如下图(a)所示。
- h函数的选取:论文分析了h函数选取为恒等映射,做常数scale,异或,1x1卷积,dropout时的表现,发现恒等映射的表现最好,主要是通过实验来分析。
- f函数的选取:由于h函数使用恒等映射表现最好,下图的分析中h函数都使用的恒等映射。下图(a)表示f函数为Relu,这是ResNetv1的做法。下图(b)表示f函数为BN+Relu。下图(c)表示f函数为恒等映射(Relu放到addition前)。下图d表示f函数为恒等映射,但是把最后一个Relu放在下一个残差块的F-path中。下图e和图d类似,只不过把BN也放在addition后的下一个残差块的F-path,ResNetv2使用的就是图e的结构,通过实验发现这个结构表现最好。
- f和h函数都为恒等映射:ResNetv2采取图e的结构,此时f和h函数都为恒等映射,那么上式可以写成下式,可以看到这样的式子有几个特点,首先,不管L和l差多少层,和总是相差一个残差函数;其次,普通网络输入和输出的关系是很多个Wx相乘(忽略激活和BN的话),而这里是各个残差函数相加;另外,从求导式看,1+后面那一项不会总是为-1(对一个mini-batch的样本来说),所以梯度很难为0。
训练配置:和ResNetv1基本一致。对于CIFAR的实验前400个iteration用0.01(warming up),之后恢复0.1,尽管观察到这对于残差块没有必要。对于ImageNet实验,学习率为0.1(no warming up),在30轮和60轮除以10。在ResNet的开头第一个残差块和最后一个残差块是特殊case,第一个残差块的激活会放在后面的“单独卷积”之后和分成两路之前,最后一个残差块的激活放在它的addition之后。
参考文献
- AlexNet(2012 NIPS):ImageNet Classification with Deep Convolutional Neural Networks(模型源码-cuda实现)
- ZFNet(2014 ECCV):Visualizing and Understanding Convolutional Networks
- OverFeat(2014 ICLR):OverFeat: Integrated Recognition, Localization and Detection using Convolutional Networks(模型源码-C++实现)
- VGG(2015 ICLR):Very Deep Convolutional Networks for Large-Scale Image Recognition(模型源码-caffe实现)
- Inception-V1(2015 CVPR):Going Deeper with Convolutions(v1到v4的模型源码-tf实现)
- Inception-V2(2015 ICML):Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift
- Inception-V3(2016 CVPR):Rethinking the Inception Architecture for Computer Vision
- Inception-V4(2016 ICLR):Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning
- ResNetv1(2016 CVPR):Deep Residual Learning for Image Recognition(模型源码-torch实现)
- ResNetv2(2016 ECCV):Identity Mappings in Deep Residual Networks(模型源码-torch实现)