Cartographer is a backpack equipped with Simultaneous Localization and Mapping (SLAM) technology.
1. Platform
Dell PC installed Ubuntu 14.4 and ROS Indigo.
2. Building & Installation
We recommend using wstool and rosdep. For faster builds, we also recommend using Ninja.
# Install wstool and rosdep. sudo apt-get update sudo apt-get install -y python-wstool python-rosdep ninja-build # Create a new workspace in 'catkin_ws'. mkdir catkin_ws cd catkin_ws wstool init src # Merge the cartographer_ros.rosinstall file and fetch code for dependencies. wstool merge -t src https://raw.githubusercontent.com/googlecartographer/cartographer_ros/master/cartographer_ros.rosinstall wstool update -t src # Install deb dependencies. rosdep init rosdep update rosdep install --from-paths src --ignore-src --rosdistro=${ROS_DISTRO} -y # Build and install. catkin_make_isolated --install --use-ninja source install_isolated/setup.bash
3. Running the demos
Now that Cartographer and Cartographer’s ROS integration are installed, download the example bags (e.g. 2D and 3D backpack collections of the Deutsches Museum) to a known location, in this case ~/Downloads, and use roslaunch to bring up the demo:
# Download the 2D backpack example bag. wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag # Launch the 2D backpack demo. roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag # Download the 3D backpack example bag. wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/cartographer_3d_deutsches_museum.bag # Launch the 3D backpack demo. roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/cartographer_3d_deutsches_museum.bag # Download the Revo LDS example bag. wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/revo_lds/cartographer_paper_revo_lds.bag # Launch the Revo LDS demo. ---- Failed to implement this one. roslaunch cartographer_ros demo_revo_lds.launch bag_filename:=${HOME}/Downloads/cartographer_paper_revo_lds.bag # Download the PR2 example bag. wget -P ~/Downloads https://storage.googleapis.com/cartographer-public-data/bags/pr2/2011-09-15-08-32-46.bag # Launch the PR2 demo. roslaunch cartographer_ros demo_pr2.launch bag_filename:=${HOME}/Downloads/2011-09-15-08-32-46.bag
The launch files will bring up roscore and rviz automatically.
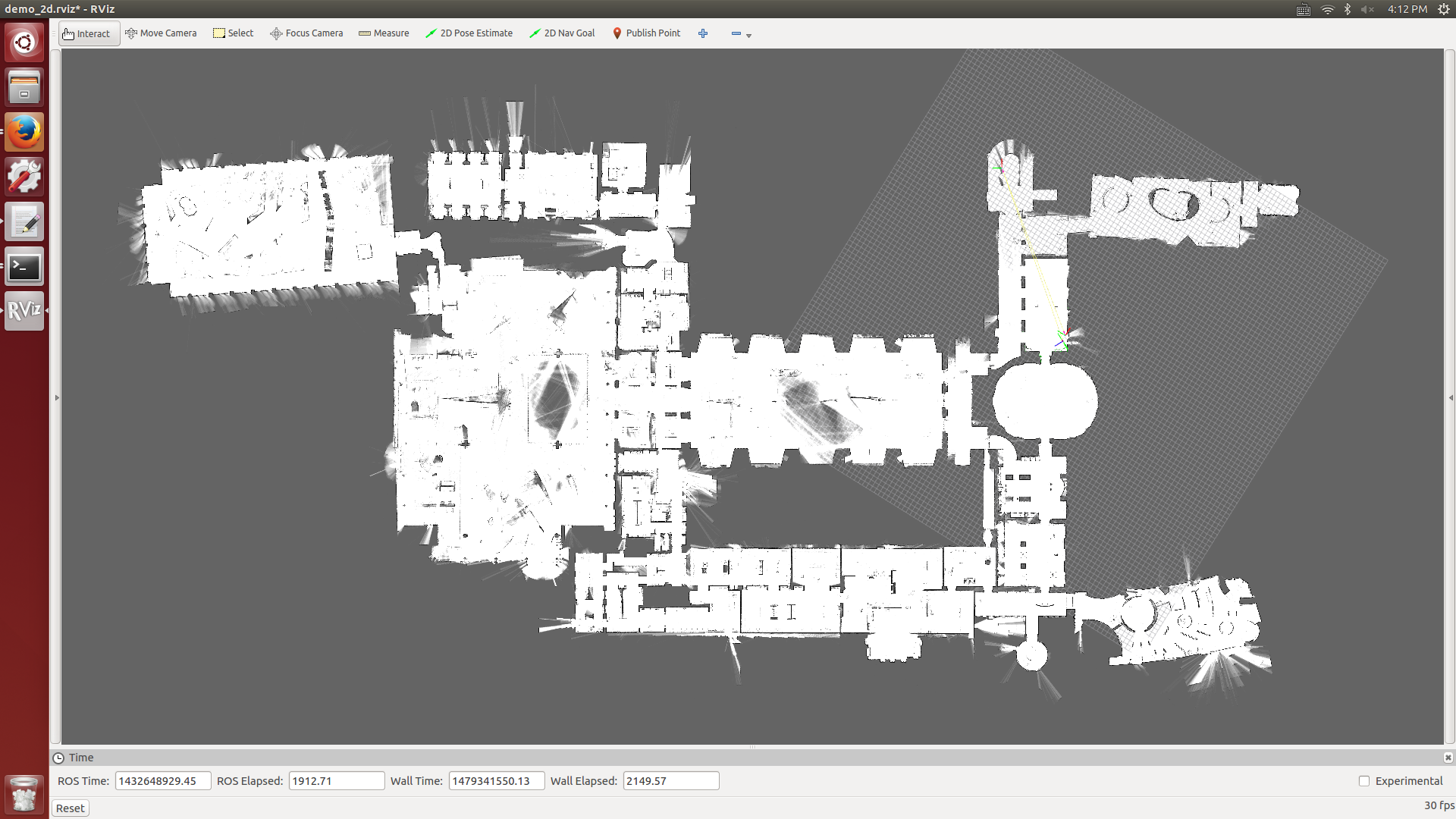
4. Results
2D backpack demo:
3D backpack demo:

Revo LDS demo:
Failed
PR2 demo:
