Matlab图像处理基础知识
Matlab的图片以矩阵的形式存储,矩阵的行列值为图片的行列的色彩值。
1图像表达方式:
- 像素索引
图像被视为离散单元。如使用I(2,2)可以获取第二行第二列的像素值
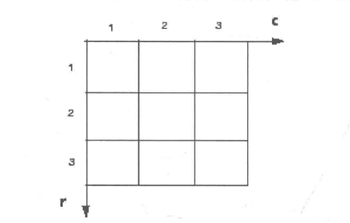
- 空间位置:
使用连续值,数据存储位置为坐标中点,存储位置可以非默认

A=magic(5); x=[19.5,23.5]; y=[8.0,12.0]; image(A,'XData',x,'YData',y),axis image,colormap(jet(25)) %image('XData',x,'YData',y,'CData',C) x,y指定横纵坐标,C为每个x,y坐标点的颜色值 %axis 设置坐标轴 %colormap 查看并设置当前颜色图 %jet 25是条目数,将RGB颜色方案平分成25种颜色
2Malatb图像类型:
二进制图
像素的取值只有0和1,分别代表黑与白。
索引图(伪彩色)
索引图中某一像素的值代表调色板中能代表绝大多数的255中颜色之一,调色板大小为256×3。假如索引值为5,那么使用调色板第五行的三个数值代表颜色。
灰度图
灰度图中某一像素的值从0-255代表从黑到白的255种颜色层次。只能表现为灰色图像。
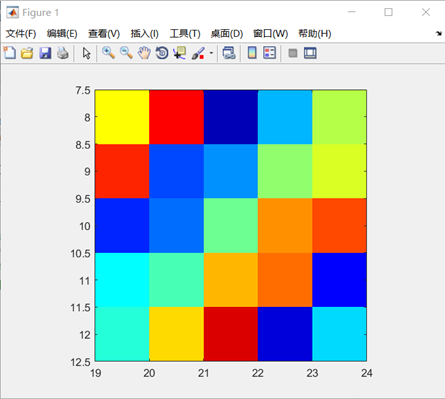
RGB图(真彩色)
在matlab中为n×m×3的多维数组,n,m,分别代表像素位置,第三维的三个数字代表RGB颜色的值。
RGB=reshape(ones(64,1)*reshape(jet(64),1,192),[64,64,3]); R=RGB(:,:,1); G=RGB(:,:,2); B=RGB(:,:,3); figure subplot(141);imshow(R) subplot(142);imshow(G) subplot(143);imshow(B) subplot(144);imshow(RGB) %reshape:重构数组,将jet(64)中的RGB颜色分离,此时的RGB参数中存储着64中颜色的RGB值 %此时的RGB中第三维的第1,2,3个数字代表R,G,B数值
3Matlab图像类型转换:
图像颜色筛选转换
X=dither(RGB,map):通过筛选算法将真彩色图像RGB按指定的颜色图map转换成索引色图像X
X = dither(RGB,map,Qm,Qe) 还指定要沿每个颜色轴为逆向颜色图使用的量化位数 Qm,以及用于颜色空间误差计算的量化位数 Qe。
BW = dither(I) 通过抖动将灰度图像 I 转换为二值(黑白)图像 BW。
asahi=imread('asahi.jpg'); imshow(asahi) %map=jet(255); %asahi_dither=dither(asahi,map); %imshow(asahi_dither)
原图:

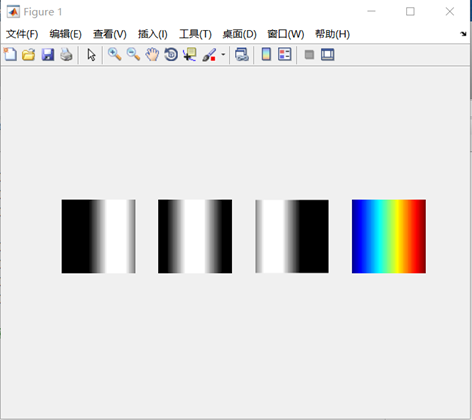
筛选转换
asahi=imread('asahi.jpg'); %imshow(asahi) map=jet(255); asahi_dither=dither(asahi,map); imshow(asahi_dither)
灰度图转换为索引图:
[X,map]=gray2ind(I,n): 根据指定灰度级数n和颜色图map转换成灰度图X,n默认值为64
索引图转换为灰度图:
I=ind2gray(X,map):将索引图X转换成灰度图I,丢弃图像色度和饱和度,仅保留亮度信息。
RGB图转换成灰度图:
X=imread('asahi.jpg'); imshow(rgb2gray(X))

RGB图转换成索引图:
[X,cmap] = rgb2ind(RGB,Q) 使用具有 Q 种量化颜色的最小方差量化法并加入抖动,将 RGB 图像转换为索引图像 X,关联颜色图为 cmap。
[X,cmap] = rgb2ind(RGB,tol) 使用均匀量化法并加入抖动,将 RGB 图像转换为索引图像,容差为 tol。
X = rgb2ind(RGB,inmap) 使用逆颜色图算法并加入抖动,将 RGB 图像转换为索引图像,指定的颜色图为 inmap。
___ = rgb2ind(___,dithering) 启用或禁用抖动。
[Y,map]=rgb2ind(imread('asahi.jpg'),12); figure imagesc(Y) colormap(map) imshow(Y,map)

索引图转换成RGB图:
RGB=ind2rgb(X,map):将矩阵X及相应的调色板map转换成真彩色图像RGB
阈值法从灰度图产生索引图:
X=grayslice(I,n):将灰度图均匀量化为n个等级,转换成伪彩色图像X
将矩阵转换成灰度图像:
mat2gray函数
I=mat2gray(X,[Xmin,Xmax]):指定区间Xmin-Xmax代表灰度0-1