国内精读!title(26):Salient Object Detection: A Discriminative Regional Feature Integration Approach(显著性检测:一个多特征自适应融合的显著性检测方法)---2013
Abstract :
本文将显著图计算视为回归(regression)问题;
所提出的方法基于多级图像分割(multi-level image segmentation);
使用监督学习(supervised learning)的方式学习出区域特征向量(regional feature vector)所对应的显著性得分(saliency score);
并最终将这些不同的多级(请注意“多级”一词)分数进行融合,得到显著性图(saliency map)。
本文贡献主要有两点(不翻译是因为英文读起来更容易理解:)
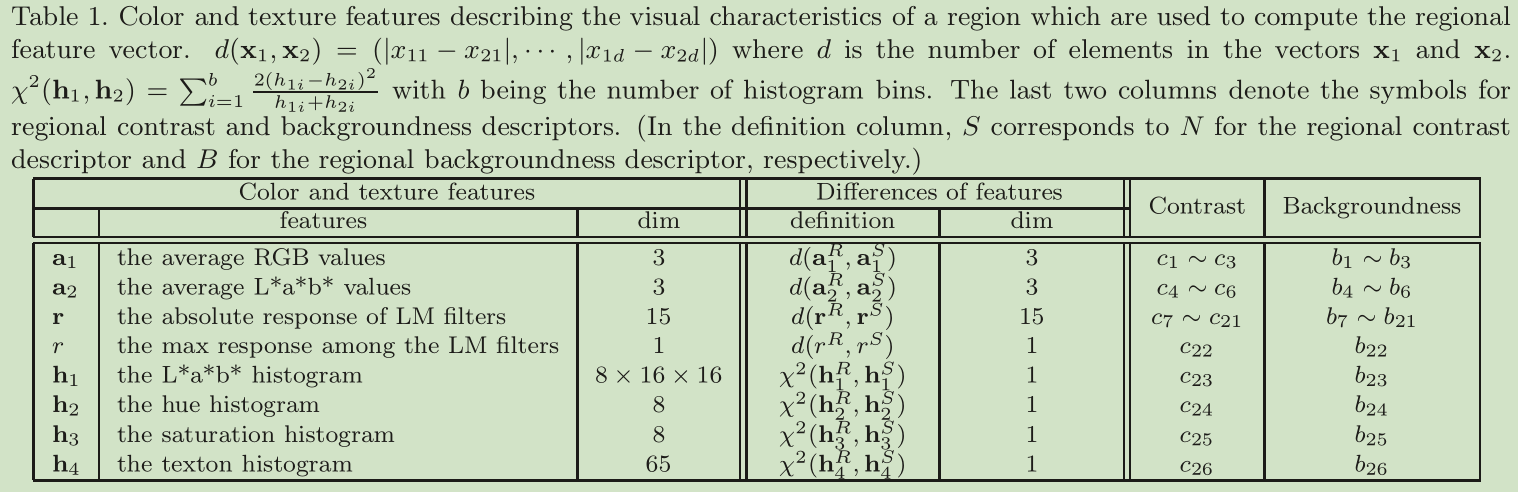
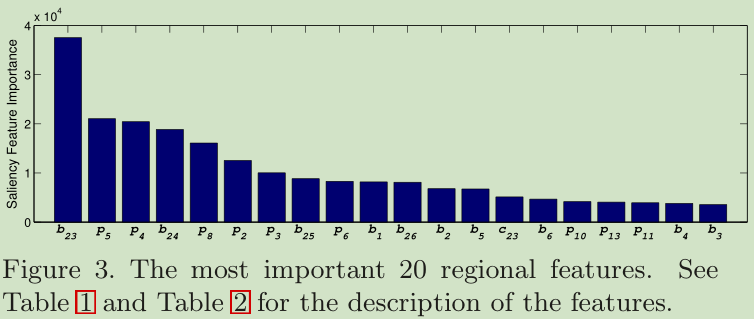
1、Integrates the regional contrast, regional property and regional backgroundness descriptors together to form the master saliency map;
2、 introduce a new regional feature vector, backgroundness, to characterize the background, which can be regarded as a counterpart of the objectness descriptor。
本文提出一种监督学习框架下的显著性检测方法。采用multi-level segmentation的方法进行分割。其主要思想为:


3 Regional backgroundnessdescriptor:

损失函数为:

通过最小化损失函数进行迭代更新得到最好的显著性区域map A。