什么是motion planning
A* 算法
部分可观察
自动驾驶规划
motion planning for autonomous driving
autonomous driving 系统软件
class2
基本模型:质点
types of path constraint
motion planning framework
主要方法
PRM
RRT
lattic 网格方法
quadratic 编程方法
先优化再平滑 spline
class 3
motion planning with environment
vehicle state和model
如何生成平滑曲线
class4
主要是motion planning
Class 1
规划的本质是最优解
规划也可以看做是一个mapping:从状态到action的mapping
什么是motion planning
- robotic fields:如何生成轨迹来达到goal
- 控制理论:动态系统来达到一个target状态
- AI:生成state-action mapping
A* 算法
启发函数:
目前的cost+启发式值(可以用增强学习来算)
部分可观察
无人车只能部分观察(只能看到周围的东西)
A* 是个globe observation——需要全知
部分可观察——贪心算法——表现为incremental search(增量搜索,渐进式搜索)
incremental search——难以实现全局最优解——但是对于规划来说,只是部分关心最优解
自动驾驶规划
- 已知:
目标函数
通用的搜索方法:最小化cost
部分观察信息——需要局部规划和修正——比如incremental search - 缺少:
部分观察空间中的动态障碍
需要动态模型
如何构建规则,创建一个computer可以理解的世界
实时计算
motion planning for autonomous driving
safely,smoothly
autonomous driving 系统软件
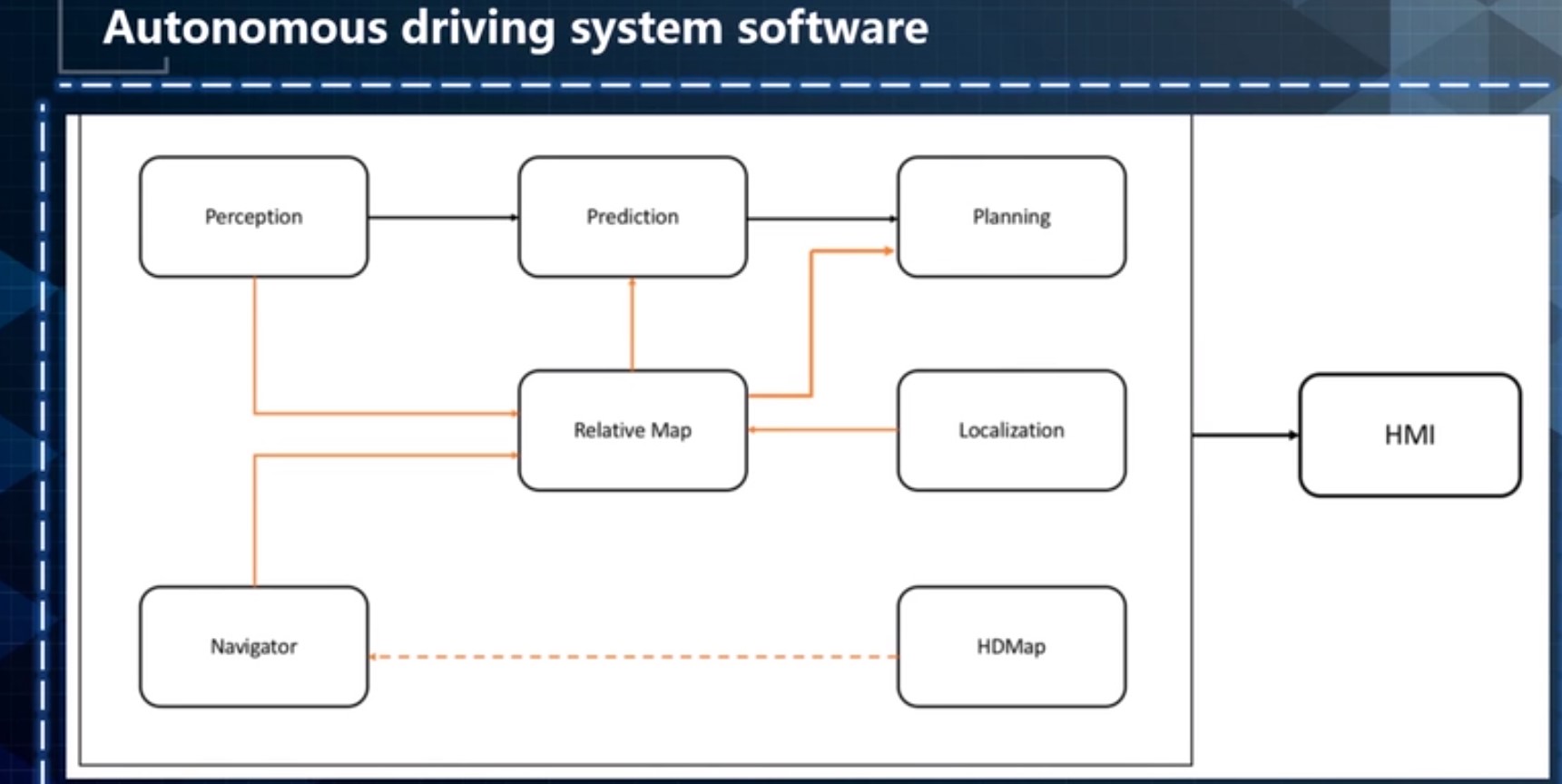
信息:动态信息(sensor)和静态信息(HD地图)
localization:位置
perception:看到了什么
prediction:预测环境如何变化
motion planning:如何进行移动
control:如何控制汽车
class2
课程内容:
- 从机器人学到自动驾驶
- 环境建模和技巧
- RRT
- Lattice
- 自动驾驶中的现代方法
基本模型:质点
但是质点不能完全描述这些信息
刚体、有形状、两个物体规划的交点
types of path constraint
- local constraint
比如避免碰撞 - differential constraint
曲率连续 - global constant
最小路径
motion planning framework
- 连续性表达
- 离散化:roadmap——将连续的运动轨迹用点和边连接表示
- roadmap方法
- 可视图——可以证明路径往往有可能是贴着边界走的

- 可视图——可以证明路径往往有可能是贴着边界走的
- cell decomposition:空间分为小网格
- potential fields:
- roadmap方法
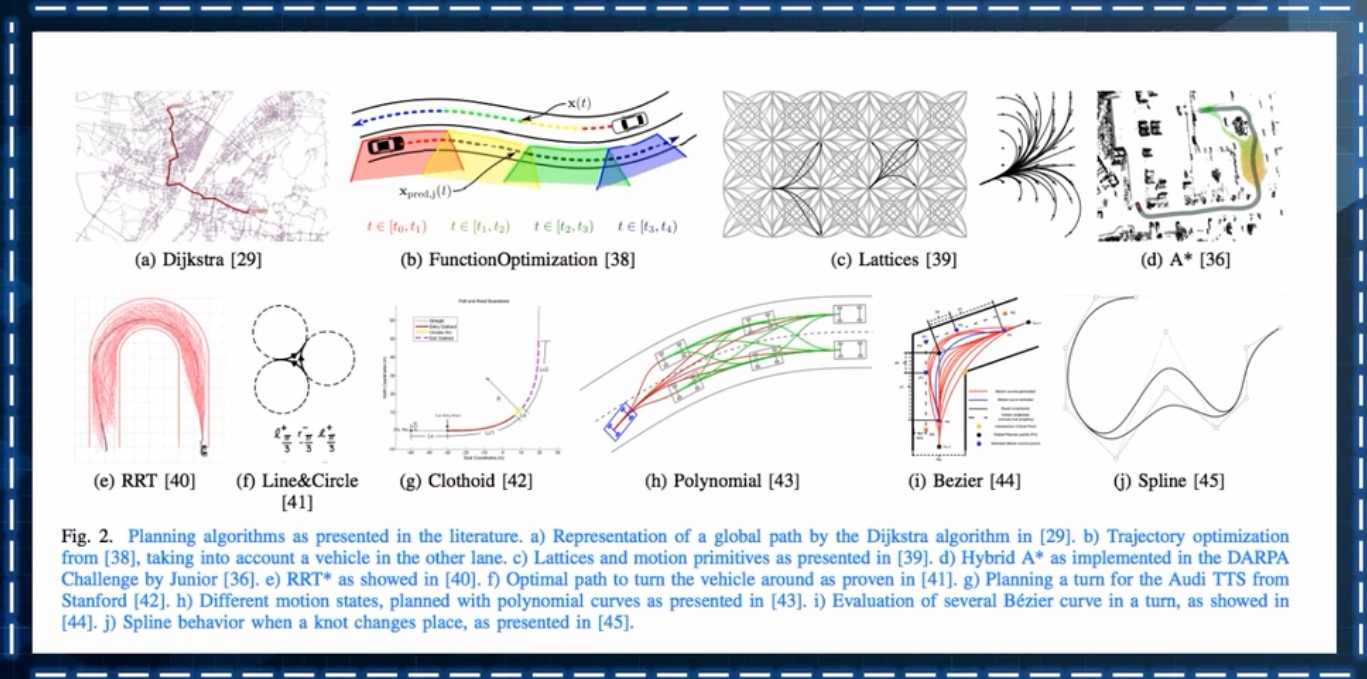
主要方法
PRM
本质就是在空间中撒点,以这些点为基础进行最短路径规划(如果撒到了obstacle上就抹去)
RRT
一种渐进的搜索方法
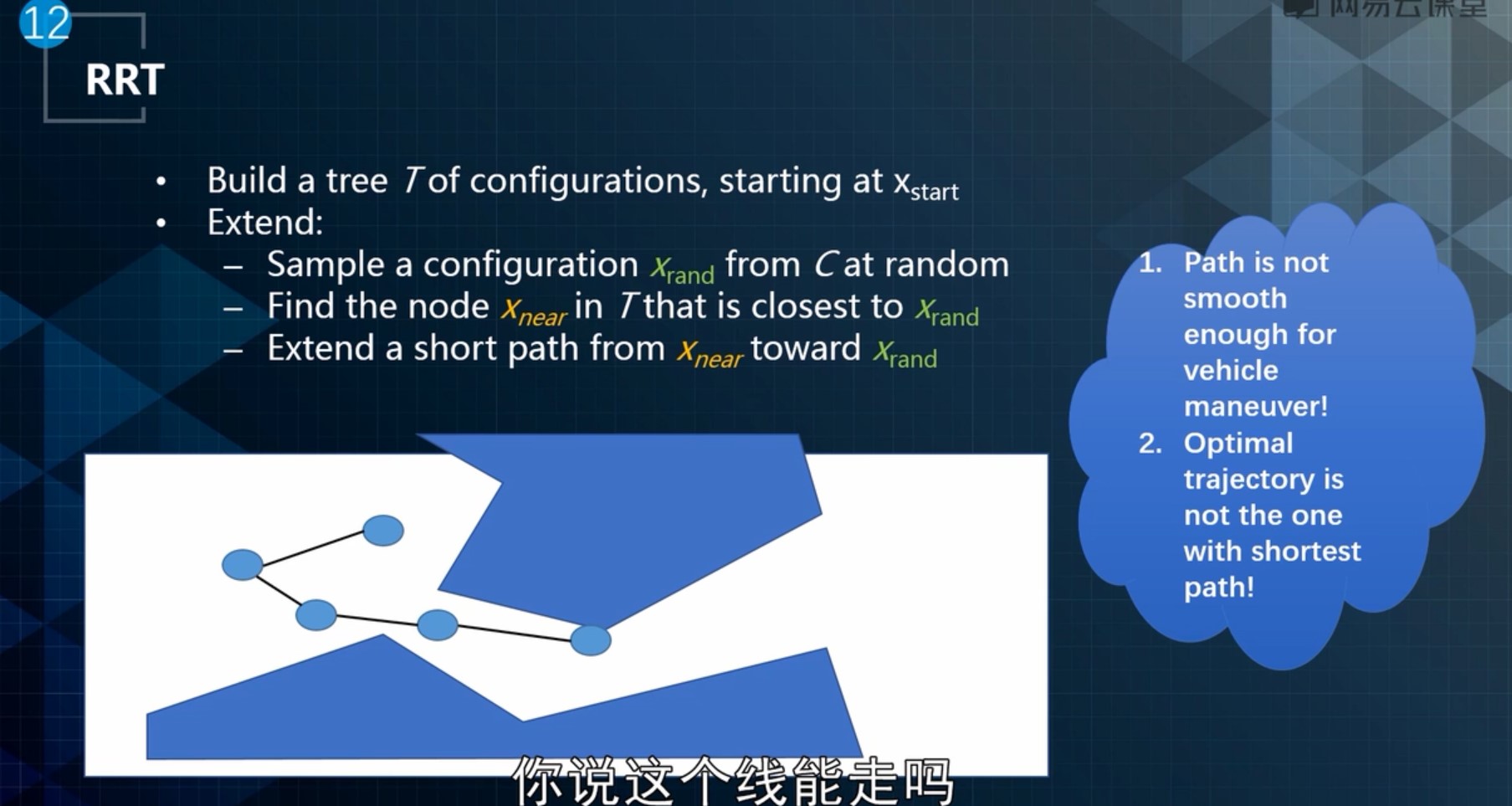
在当前点的附近进行撒点,如果新的点是可走的,那么就衔接起来
但是RRT不是
改进:
incremental sample 是有方向的,可以用平滑曲线去sample
lattic 网格方法
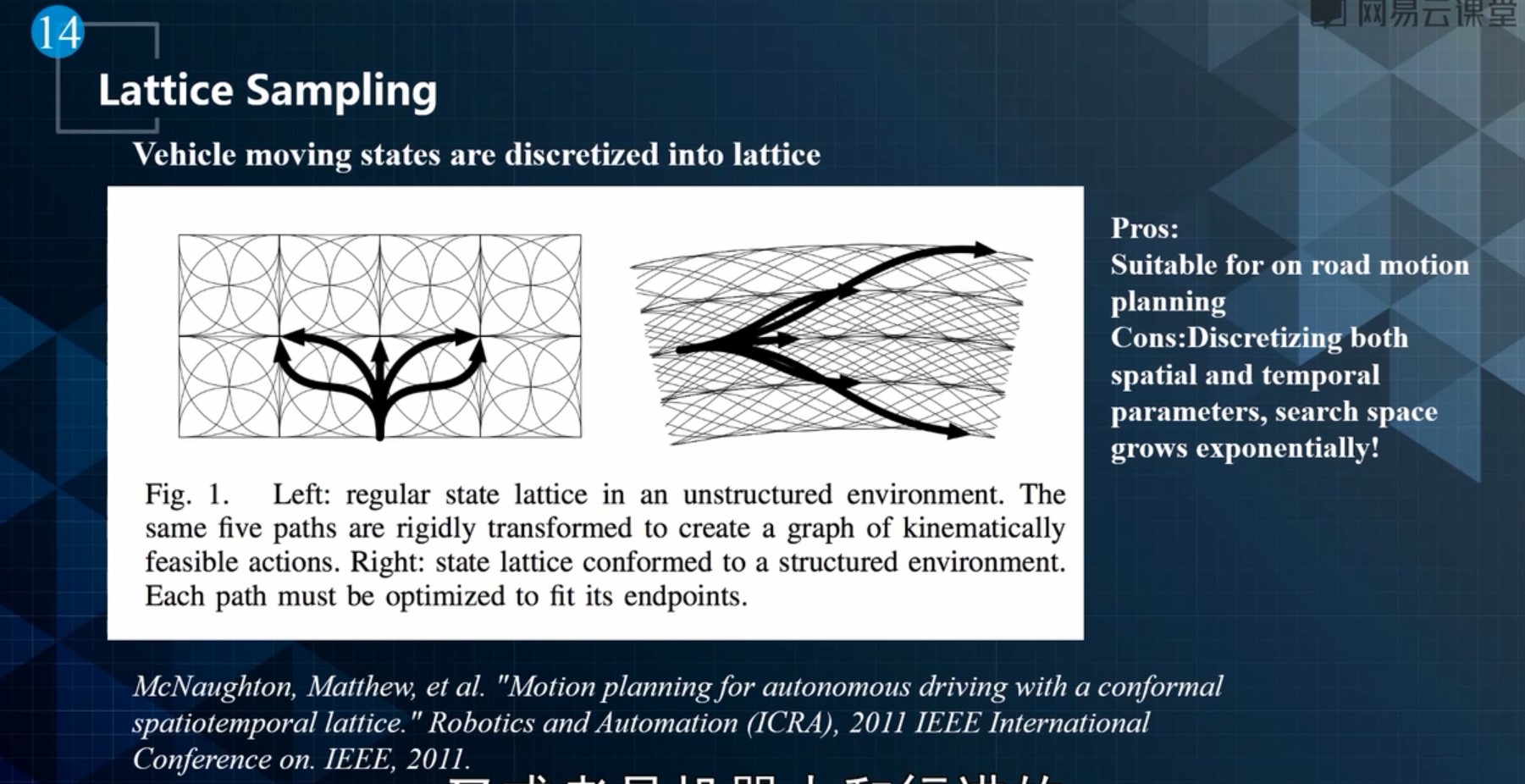
分为网格,走的路径是平滑曲线
一开始是在configuration space里面进行sample的
问题是:搜索空间太大
改进方法:
- 在sl坐标系中进行
- 除了位置要离散化之外,还需要对时间进行sample
- lattic with longitudinal and lateral decomposition
- 基于lattic的优化:path speed iterative method
三维优化比较困难,这个迭代方法就是先从path维度上优化,然后再在speed维度上优化,不断迭代——时间复杂度减少,但是这个方法不一定有最优解
quadratic 编程方法
要求目标函数和search 空间也是凸的
速度特别快
凸优化问题——唯一的最优解
先优化再平滑 spline
虽然曲线平滑,但是曲率变化也比较大
增加阶数?阶数越高,误差越大,可能会撞上障碍
class 3
motion planning with environment
configuration space:geometric complexity和space dimensionality
vehicle state和model
刚体,前轮驱动,坐标转换(SL和XY)
SL坐标不是唯一的,但是在一定情况下是唯一的
如何生成平滑曲线
class4
优化的关键
- objective function
- constraint:平滑之类的