标题:《SSD: Single Shot MultiBox Detector》
时间:2015
出版源:ECCV 2016
主要链接:
- arXiv:https://arxiv.org/abs/1512.02325
- github(Official):https://github.com/weiliu89/caffe/tree/ssd
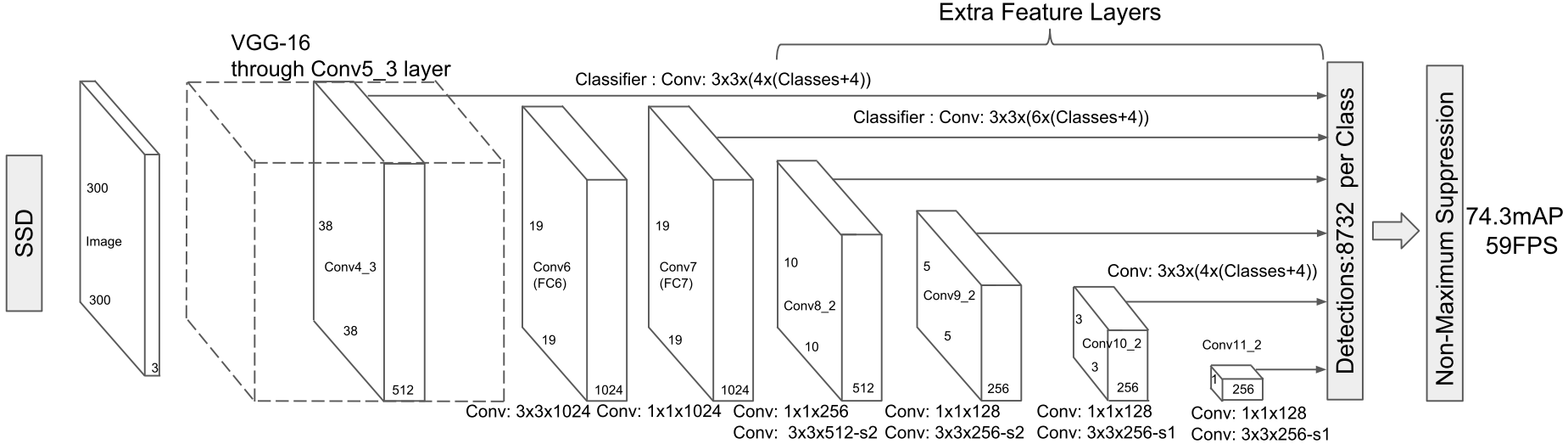
不同于前面的RCNN系列,SSD属于one-stage方法。SSD使用 VGG16 网络作为特征提取器(和 Faster R-CNN 中使用的 CNN 一样),将后面的全连接层替换成卷积层,并在之后添加自定义卷积层,并在最后直接采用卷积进行检测。在多个特征图上设置不同缩放比例和不同宽高比的default boxes(先验框)以融合多尺度特征图进行检测,靠前的大尺度特征图可以捕捉到小物体的信息,而靠后的小尺度特征图能捕捉到大物体的信息,从而提高检测的准确性和定位的准确性。如下图是SSD的网络结构图。
1. 怎样设置default boxes?
SSD中default box的概念有点类似于Faster R-CNN中的anchor。不同于Faster R-CNN只在最后一个特征层取anchor, SSD在多个特征层上取default box,可以得到不同尺度的default box。在特征图的每个单元上取不同宽高比的default box,一般宽高比在{1,2,3,1/2,1/3}中选取,有时还会额外增加一个宽高比为1但具有特殊尺度的box。如下图所示,在8x8的feature map和4x4的feature map上的每个单元取4个不同的default box。原文对于300x300的输入,分别在conv4_3, conv7,conv8_2,conv9_2,conv10_2,conv11_2的特征图上的每个单元取4,6,6,6,4,4个default box. 由于以上特征图的大小分别是38x38,19x19,10x10,5x5,3x3,1x1,所以一共得到38x38x4+19x19x6+10x10x6+5x5x6+ 3x3x4+1x1x4=8732个default box.对一张300x300的图片输入网络将会针对这8732个default box预测8732个边界框。

2. 怎样对先验框进行匹配?
SSD在训练的时候只需要输入图像和图像中每个目标对应的ground truth. 先验框与ground truth 的匹配遵循两个原则:
(1)对图片中的每个ground truth, 在先验框中找到与其IOU最大的先验框,则该先验框对应的预测边界框与ground truth 匹配。
(2)对于(1)中每个剩下的没有与任何ground truth匹配到的先验框,找到与其IOU最大的ground truth,若其与该ground truth的IOU值大于某个阈值(一般设为0.5),则该先验框对应的预测边界框与该ground truth匹配。
按照这两个原则进行匹配,匹配到ground truth的先验框对应的预测边界框作为正样本,没有匹配到ground truth的先验框对应的预测边界框作为负样本。尽管一个ground truth可以与多个先验框匹配,但是ground truth的数量相对先验框还是很少,按照上面的原则进行匹配还是会造成负样本远多于正样本的情况。为了使正负样本尽量均衡(一般保证正负样本比例约为1:3),SSD采用hard negative mining, 即对负样本按照其预测背景类的置信度进行降序排列,选取置信度较小的top-k作为训练的负样本。
3. 怎样得到预测的检测结果?
最后分别在所选的特征层上使用3x3卷积核预测不同default boxes所属的类别分数及其预测的边界框location。由于对于每个box需要预测该box属于每个类别的置信度(假设有c类,包括背景)和该box对应的预测边界框的location(包含4个值,即该box的中心坐标和宽高),则每个box需要预测c+4个值。所以对于某个所选的特征层,该层的卷积核个数为(c+4)x该层的default box个数.最后将每个层得到的卷积结果进行拼接。对于得到的每个预测框,取其类别置信度的最大值,若该最大值大于置信度阈值,则最大值所对应的类别即为该预测框的类别,否则过滤掉此框。对于保留的预测框根据它对应的先验框进行解码得到其真实的位置参数(这里还需注意要防止预测框位置超出图片),然后根据所属类别置信度进行降序排列,取top-k个预测框,最后进行NMS,过滤掉重叠度较大的预测框,最后得到检测结果。
SSD优势是速度比较快,整个过程只需要一步,首先在图片不同位置按照不同尺度和宽高比进行密集抽样,然后利用CNN提取特征后直接进行分类与回归,所以速度比较快,但均匀密集采样会造成正负样本不均衡的情况使得训练比较困难,导致模型准确度有所降低。另外,SSD对小目标的检测没有大目标好,因为随着网络的加深,在高层特征图中小目标的信息丢失掉了,适当增大输入图片的尺寸可以提升小目标的检测效果。
转:目标检测