<更新提示>
<第一次更新>
<正文>
玩具装箱TOY(HNOI2008)
Description
P教授要去看奥运,但是他舍不下他的玩具,于是他决定把所有的玩具运到北京。他使用自己的压缩器进行压缩,其可以将任意物品变成一堆,再放到一种特殊的一维容器中。P教授有编号为 (1. . .N) 的 (N) 件玩具,第 (i) 件玩具经过压缩后变成一维长度为 (C_i) .为了方便整理,(P)教授要求在一个一维容器中的玩具编号是连续的。同时如果一个一维容器中有多个玩具,那么两件玩具之间要加入一个单位长度的填充物,形式地说如果将第 (i) 件玩具到第 (j) 个玩具放到一个容器中,那么容器的长度将为 (x=j-i+sum_{k=i}^jC_k) 制作容器的费用与容器的长度有关,根据教授研究,如果容器长度为 (x) ,其制作费用为 ((x-L)^2) .其中 (L) 是一个常量。(P)教授不关心容器的数目,他可以制作出任意长度的容器,甚至超过 (L) 。但他希望费用最小.
Input Format
第一行输入两个整数(N),(L).接下来N行输入(C_i).(1<=N<=50000,1<=L,C_i<=10^7)
Output Format
输出最小费用
Sample Input
5 4
3
4
2
1
4
Sample Output
1
解析
简单分析题目大意:给定一个数列,可以将其分为若干个连续的子段,将区间([i,j])分为一段的花费为((j-i+sum_{k=i}^jC_k-L)^2),求最小划分总花费。
由于没有需要划分多少段的限制,可以直接简单地设置状态:f[i]代表完成了前i个数的划分的最小花费和。
区间的花费是利用前缀和可以O(1)求解的,那么状态转移方程就是$$f_i=min{f_j+(i-(j+1)+sum_i-sum_j-L)^2}$$
暴力思路:(O(n^2))枚举(i,j)求解。
但是(50000)的数据(O(n^2))肯定不行啊,我们考虑优化这个dp。
先化简括号内花费内容:
代回原式:
假设我们已经找到了最优的(f_j),那么:
(将只与i有关的项和只与j有关的项分别整理)
这个时候我们发现式子中有一项是即和(i)有关有和(j)有关的,然后就可以做一些神奇的优化了。
我们视(f_j+b_j^2)为(y),(b_j)为(x),(2a_i)为(k),((f_i+a_i^2))为(b),那么我们就可以把它当做一个一次函数的的表达式(y=kx+b)。而且这个一次函数需满足:
1.过定点((b_j,f_j+b_j^2)),由于这个点只和(j)有关,称其为(P_j)
2.其斜率为(2a_i)
这时候,我们需要重新定义(f_i)的含义:满足两个要求的一次函数的截距((b))加上(a_i^2)。
由于(a_i^2)的值是确定的,我们需要求最小的(f_i),即求做小的一次函数的截距。
我们将满足斜率为(2a_i)的直线以及点(P_1,P_2,...,P_j)描述在图中:
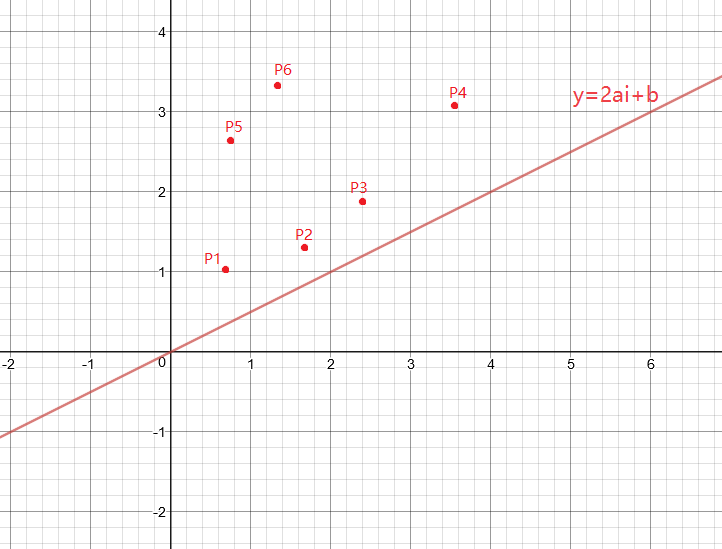
直线自下向上移动,只要它过任何一个点(P),它就成为了符合要求的直线。
我们要求截距最小,显然,当它自下向上移动过的第一个点(P_j)时,截距最小。如图,此时能取得截距最小的点是(P_2)。那么由上可知,(j=2)时,一次函数的截距最小,更新得到的(f_i)也是最小的。
所以,我们的目标就转变为了找到一次函数能够第一个“碰到”的点。
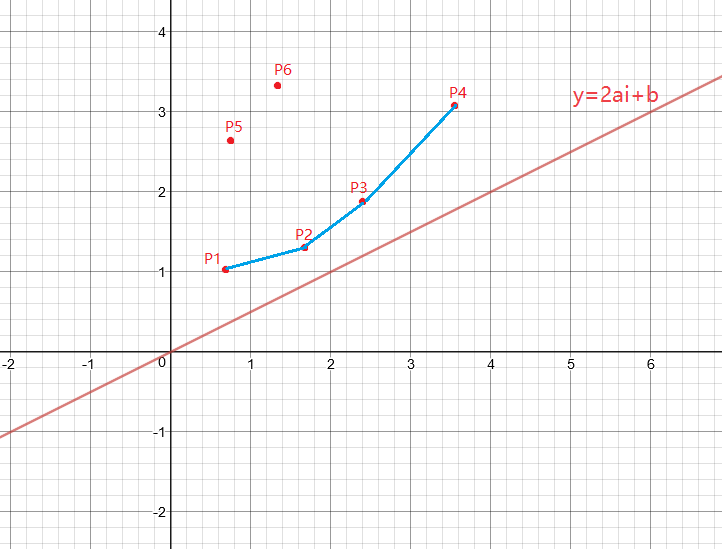
观察上图,我们将最有可能与直线先“碰到”的点(最外围的点)两两相连,发现:它们近似的构成了一个下凸壳的形状,两两相连的线段所在的直线的斜率依次递增。
此时我们发现了一个很好的性质,我们的目标直线第一个过的点最优点(P_j)满足:(P_j,P_{j+1})所在直线是斜率大于目标直线斜率的第一条直线。((P_2,P_3)构成的直线的斜率大于图中直线的斜率,但(P_1,P_2)构成的直线的斜率小于图中直线的斜率,所以(P_2)为最优点)
那么这就成为了我们的突破口了:由于构成下凸壳直线满足斜率单调递增,我们用单调队列维护这些(P)点。由于随着i的增加,(a_i)也是单调递增的,这就应和了单调队列的操作。
对于每一个(i),我们让斜率小于(2a_i)的单调队列中的直线所对应的点出队(它小于当前的(2a_i),由于(a_i)单调递增,它也一定小于以后的(2a_i),所以这些点将会是一直无用的,可以直接出队),直到找到第一条斜率大于(2a_i)的直线,此时,队头的点的编号j即为最优决策。我们直接利用该决策转移。
完成转移以后,新的点(P_i)也需要加入队列里,此时,我们还要维护一个操作:
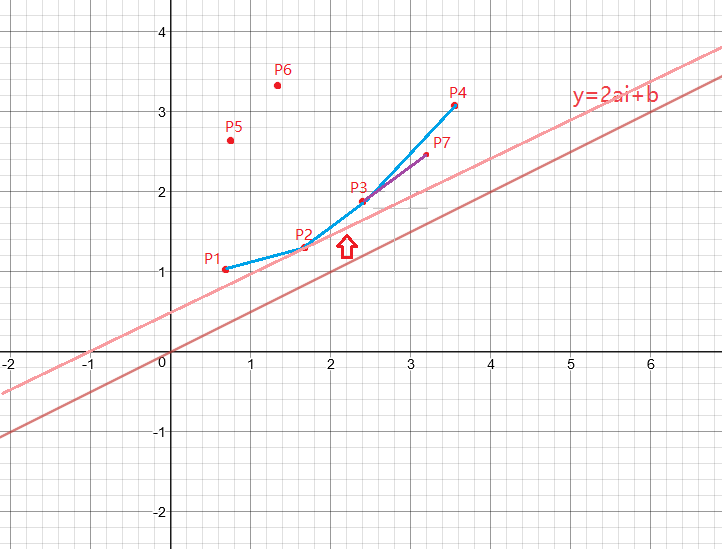
当(P_i)(图中的(P_7))加入后,我们发现,原来的(P_4,P_3)构成的直线的斜率大于(P_3)和新的(P_4)构成的斜率,这样,(P_4)就到了内部,新的下凸壳由(P_1,P_2,P_3,P_7)构成,我们需要让(P_4)出队。
即当(slope(q[tail],q[tail-1])>slope(q[tail-1],i))((slope)代表斜率函数)时,队尾出队。
事实上,我们在不断维护一个下凸壳的形状,由于单调队列一共会进出至多N个点,所以,这样实现转移的时间复杂度是(O(n))的,我们将此种优化方法称为斜率优化。
(Code:)
#include<bits/stdc++.h>
using namespace std;
const int N=50000+80;
long long f[N],q[N],sum[N],toy[N],n,L,head,tail;
inline long long a(long long k){return sum[k]+k;}
inline long long b(long long k){return a(k)+L+1;}
inline long long x(long long k){return b(k);}
inline long long y(long long k){return f[k]+b(k)*b(k);}
inline double slope(long long p,long long q){return ((y(p)-y(q))*1.0)/((x(p)-x(q))*1.0);}
int main(void)
{
freopen("toy.in","r",stdin);
freopen("toy.out","w",stdout);
scanf("%lld%lld",&n,&L);
for(int i=1;i<=n;i++)
{
scanf("%lld",&toy[i]);
sum[i]=sum[i-1]+toy[i];
}
for(int i=1;i<=n;i++)
{
while(head<tail&&slope(q[head],q[head+1])<2*a(i))head++;
f[i]=f[q[head]]+(a(i)-b(q[head]))*(a(i)-b(q[head]));
while(head<tail&&slope(q[tail],q[tail-1])>slope(q[tail-1],i))tail--;
q[++tail]=i;
}
printf("%lld
",f[n]);
}
<后记>