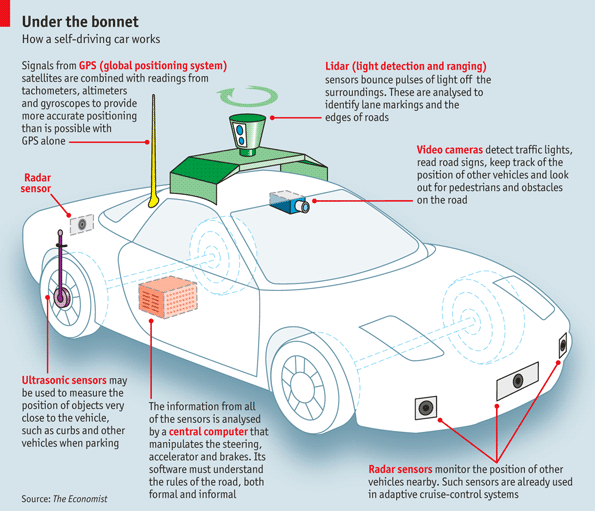
雷达:主动发出电磁波,用于测距(深度信息)
激光雷达
单线:1根线,最终扫出一个面
用途:自动驾驶中的跟车
多线:多线,扫出一个空间。
用途:空间内测距,测速,三维成像(slam sfm)
毫米波雷达
用途:测距,测相对速度,近距离探测
抗干扰能力强,雨雪天气正常工作,因此应用广泛。因此易受其他场景应用影响。
自动驾驶:一般使用调频连续式 毫米波雷达
超声波雷达:
用途:泊车避障
雷达感知技术
智能驾驶感知过程中,毫米波雷达和超声波雷达的主要作用即为 测距和测速,目前在盲点探测、自适应巡航、前/后方碰撞预警等技术 中应用较为广泛。
除了距离和速度,激光雷达还能够较为准确地获取目标的形状、 深度等信息。随着激光雷达性能的提高,相应的激光雷达感知技术也 在不断发展。目前常用的感知技术主要有:
1)障碍物检测与跟踪,关键在于同一时刻障碍点的聚类和不同 时刻障碍物的匹配,基于深度学习的雷达障碍物检测逐渐成为近年来 的研究热点,雷达与图像融合的障碍物检测技术研究也取得了一定成 果;
2)路面检测,主要是为了区分路面和道路上的其他目标障碍物, 还可以通过检测路面材质和坡度为智能驾驶车辆决策和控制提供数 据参考;
3)定位与导航,基于激光雷达的 SLAM 在智能车定位中可以发 挥重要作用,智能车通过检测路边障碍物位置判断道路走向并实现基 于雷达的自主导航;
4)三维重建,利用激光雷达获取的深度信息即可以实现智能车 周围环境的三维场景重建。