第6课 CC2530的ADC工作原理与应用
广东职业技术学院 欧浩源
一、A/D转换的基本工作原理
将时间上连续变化的模拟量转化为脉冲有无的数字量,这一过程就叫做数字化,实现数字化的关键设备是ADC。
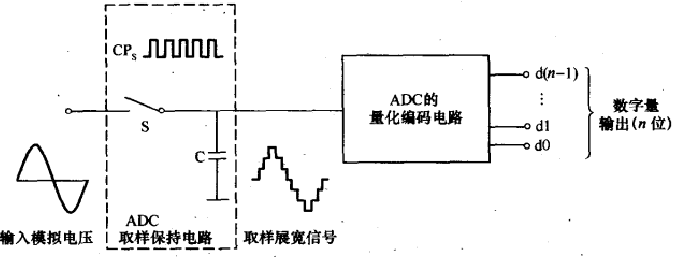
ADC:数模转换器,将时间和幅值连续的模拟量转化为时间和幅值离散的数字量,A/D转换一般要经过采样、保持、量化和编码4个过程。
二、CC2530的A/D转换模块
CC2530的ADC模块支持最高14位二进制的模拟数字转换,具有12位的有效数据位,它包括一个模拟多路转换器,具有8个各自可配置的通道,以及一个参考电压发生器。

该ADC模块有如下主要特征:
<1> 可选取的抽取率,设置分辨率(7~12位)。
<2> 8个独立的输入通道,可接收单端或差分信号。
<3> 参考电压可选为内部单端、外部单端、外部差分或AVDD5。
<4> 单通道转换结束可产生中断请求。
<5> 序列转换结束可发出DMA触发。
<6> 可将片内温度传感器作为输入。
<7> 电池电压测量功能。
三、ADC模块的信号输入
端口0引脚可以配置为ADC输入端,依次为AIN0~AIN7:
<1> 可以把输入配置为单端输入或差分输入。
<2> 差分输入对:AIN0~AIN1、AIN2~AIN3、AIN4~AIN5、AIN6~AIN7。
<3> 片上温度传感器的输出也可以作为ADC的输入用于测量芯片的温度。
<4> 可以将一个对应AVDD5/3的电压作为ADC输入,实现电池电压监测。
<5> 负电压和大于VDD的电压都不能用于这些引脚。
<6> 单端电压输入AIN0~AIN7,以通道号码0~7表示;四个差分输入对则以 通道号码8~11表示;温度传感器的通道号码为14;AVDD5/3电压输入的通道号码为15。
四、ADC相关的几个概念
<1> 序列ADC转换:可以按序列进行多通道的ADC转换,并把结果通过DMA传送到存储器,而不需要CPU任何参与。
<2> 单通道ADC转换:在程序设计中,通过写ADCCON3寄存器触发单通道ADC转换,一旦寄存器被写入,转换立即开始。
<3> 参考电压:内部生成的电压、AVDD5引脚、适用于AIN7输入引脚的外部电压,或者 适用于AIN6~AIN7输入引脚的差分电压。
<4> 转换结果:数字转换结果以2的补码形式表示。对于单端,结果总是正的。对于差分配置,两个引脚之间的差分被转换,可以是负数。 当ADCCON1.EOC设置为1时,数字转换结果可以获得,且结果总是驻留在ADCH和ADCL寄存器组合的MSB段中。
<5> 中断请求:通过写ADCCON3触发一个单通道转换完成时,将产生一个中断,而完成 一个序列转换时,是不产生中断的。当每完成一个序列转换,ADC将产生 一个DMA触发。
<6> 寄存器:ADC有两个数据寄存器:ADCL和ADCH;三个控制寄存器:ADCCON1、ADCCON2、ADCCON3;分别用来配置ADC并返回转换结果。
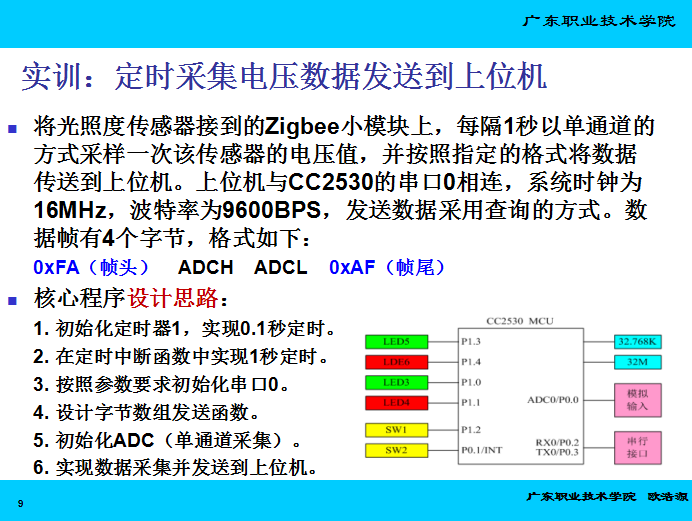
五、实训项目:定时采集电压数据发送到上位机
【1】配置APCFG寄存器
当使用ADC时,端口0的引脚必须配置为ADC模拟输入。要配置一个端口0引脚为一个ADC输入,APCFG寄存器中相应的位必须设置为1。这个寄存器的默认值是0,选择端口0为非模拟输入,即作为数字I/O端口。
注意:APCFG寄存器的设置将覆盖P0SEL的设置。

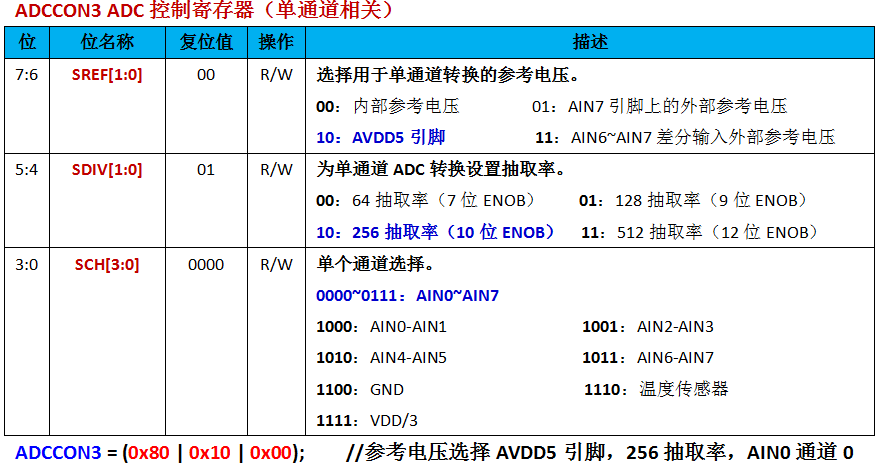
【2】配置ADCCON3寄存器
单通道的ADC转换,只需将控制字写入ADCCON3寄存器即可。
【3】ADC初始化
主要对端口的功能进行选择,设置其传输方向,并将端口设置为模拟输入。
【4】ADC数据采集
首先将ADCIF标志位清0,接着对ADCCON3寄存器设置,该寄存器一旦被写入,转换立即开启;然后等待ADCIF置1,这时候转换完成,读取数据即可。
【5】实训项目源代码
#include "ioCC2530.h" /*===============定时器1初始化函数==================*/ void Init_Timer1() { T1CC0L = 0xd4; //设置最大计数值的低8位 T1CC0H = 0x30; //设置最大计数值的高8位 T1CCTL0 |= 0x04; //开启通道0的输出比较模式 T1IE = 1; //使能定时器1中断 T1OVFIM = 1; //使能定时器1溢出中断 EA = 1; //使能总中断 T1CTL = 0x0e; //分频系数是128,模模式 } unsigned char count = 0; unsigned char F_time = 0; /*================定时器1服务函数====================*/ #pragma vector = T1_VECTOR __interrupt void Timer1_Sevice() { T1STAT &= ~0x01; //清除定时器1通道0中断标志 count++; if(count == 10) //定时1秒到 { F_time = 1; count = 0; } } /*===================UR0初始化函数====================*/ void Init_Uart0() { PERCFG = 0x00; //串口0的引脚映射到位置1,即P0_2和P0_3 P0SEL = 0x0C; //将P0_2和P0_3端口设置成外设功能 U0BAUD = 59; //16MHz的系统时钟产生9600BPS的波特率 U0GCR = 9; U0UCR |= 0x80; //禁止流控,8位数据,清除缓冲器 U0CSR |= 0xC0; //选择UART模式,使能接收器 UTX0IF = 0; //清除TX发送中断标志 URX0IF = 0; //清除RX接收中断标志 URX0IE = 1; //使能URAT0的接收中断 EA = 1; //使能总中断 } unsigned char dat[4]; /*===================UR0发送字符串函数==================*/ void UR0SendString(unsigned char *str, unsigned char count) { while(count--) { U0DBUF = *str++; //将要发送的1字节数据写入U0DBUF while(!UTX0IF); //等待TX中断标志,即数据发送完成 UTX0IF = 0; } } /*===================ADC初始化函数====================*/ void Init_ADC0() { P0SEL |= 0x01; //P0_0端口设置为外设功能 P0DIR &= ~0x01; //P0_0端口设置为输入端口 APCFG |= 0x01; //P0_0作为模拟I/O使用 } /*===================读取ADC的数据====================*/ void Get_ADC0_Value() { ADCIF = 0; //参考电压选择AVDD5引脚,256抽取率,AIN0通道0 ADCCON3 = (0x80 | 0x10 | 0x00); while(!ADCIF); //等待A/D转换完成, dat[0] = 0xaf; dat[1] = ADCH; //读取ADC数据低位寄存器 dat[2] = ADCL; //读取ADC数据高位寄存器 dat[3] = 0xfa; } /*=======================主函数======================*/ void main() { Init_Uart0(); Init_Timer1(); Init_ADC0(); while(1) { if(F_time == 1) //定时1秒时间到 { Get_ADC0_Value(); //进行A/D转换并读取数据 UR0SendString(dat,4); //向上位机发送数据 F_time = 0; //定时1秒标志清0 } } }
【结语】:
关于CC2530微控制器入门基础教程到此大功告成。
理解并能独立完成上述6个基本模块的应用,可以说基本上掌握了CC2530的基础应用,为日后学习Zigbee组网应用打下了良好的基础。
对于CC2530来说,进行低功耗无线组网应用才是它的真正使命。有了我们入门的基础,后面如果有时间,我会把OSAL操作系统和z-Stack协议栈的应用再做两个系列的教材,让大家真正的掌握CC2530的应用精髓。
--------------------------------------------------------------------------------------------------------------------